
详解一下webrtc tcc算法,本文主要内容:
- tcc架构
- 趋势滤波算法
- webrtc tcc与gcc的比较
作者:小新快跑
来源:音视频小话
原文:https://mp.weixin.qq.com/s/sAXSx3435tlgLHE0FyrbOg
1. 前言
webrtc的tcc算法,具体做法是,接收端监控两个数据,并反馈给发送端。
- 丢包率: 接收端计算出丢包率,定期发送rtcp rr报文(内有丢包率)给发送端,发送端通过丢包率的大小来决定是否降低编码的bitrate;
- Transport-wide RTCP Feedback Message,接收端记录每个rtp报文的wideSeqNumber,到达timestamp,整理后打包成rtcp tcc报文发送给接收端,接收端整理rtcp tcc报文中的到达timestamp与发送端的时间等数据,通过趋势滤波算法,判断拥塞程度,是否降低码率,增加码率,或保持码率。
基于丢包率来调整动态编码,是比较简单,很多厂家经常在sfu服务端进行调整,如:如果不是长肥型网络,在丢包率<30%的情况下,rtcp rr中的丢包率和丢包总数欺骗性的填写0,这样发送端(尤其是web端)就不会轻易的降低bitrate,到达测试的良好效果
但是基于tcc架构的带宽预测,相对比较复杂(但是比卡曼滤波简单很多),本文主要讲解这部分的原理和实现
2. Webrtc Tcc架构
2.1 sdp的关键信息
- rtp extension header
需要使能这个rtp扩展项:
a=extmap:4 http://www.ietf.org/id/draft-holmer-rmcat-transport-wide-cc-extensions-01如上例子,extensionId=4,表示有rtp报文将携带扩展项transport-wide sequence。在rtp的扩展头中会有16bit的transport-wide sequence,注意这个wide seq不是针对某个视频或音频,而是针对某个PeerConnection(其中可能传输多个音视频),rtp报文的扩展项如下格式:
0 1 2 3
0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
| 0xBE | 0xDE | length=1 |
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
| ID | L=1 |transport-wide sequence number | zero padding |
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+使能Rtcp Fb transport-cc
a=rtcp-fb:96 transport-cc如上,在rtcp-feedback 中使能transport-cc。
2.2 基础流程架构
webrtc tcc基本的流程架构如下:
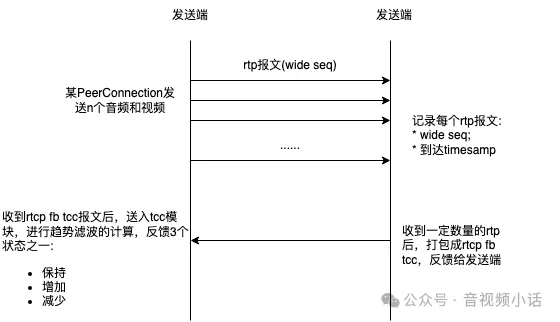
如上图,做带宽预测主要在发送端,在收到发送端的rtcp fb tcc报文后,进行趋势滤波计算,返回带宽状态(保持,增加,减少)。
3. 趋势滤波
webrtc tcc在发送端的带宽估计算法,主要应用趋势滤波算法。相对卡曼滤波算法来说,简单一些。
延时的计算方法:
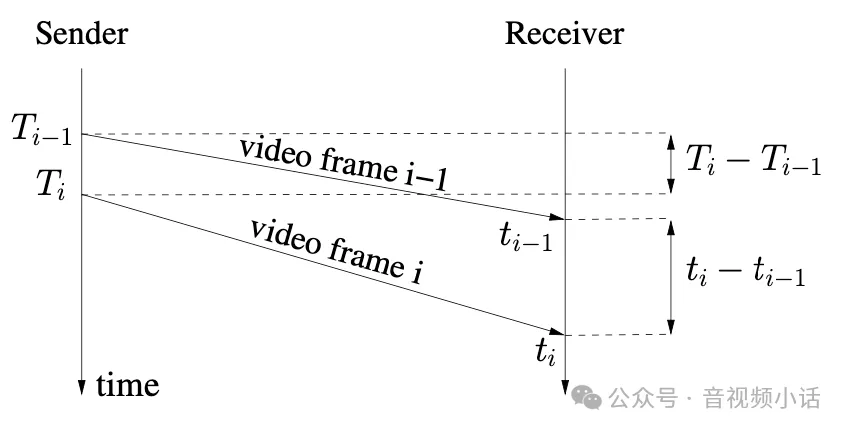
如上图,延时如何得出:
Delay(i) = {t(i) – t(i-1)} – {T(i) – T(i-1)}
趋势滤波的建模思路如下,
- x横坐标:为rtp报文到达的时间戳,接收方记录下每个报文到达的系统时间戳;
- y纵坐标:为rtp报文累积延时,通过Delay(i) = {t(i) – t(i-1)} – {T(i) – T(i-1)},计算出每次的延时,然后延时经过累加,得到纵坐标;
如下图:
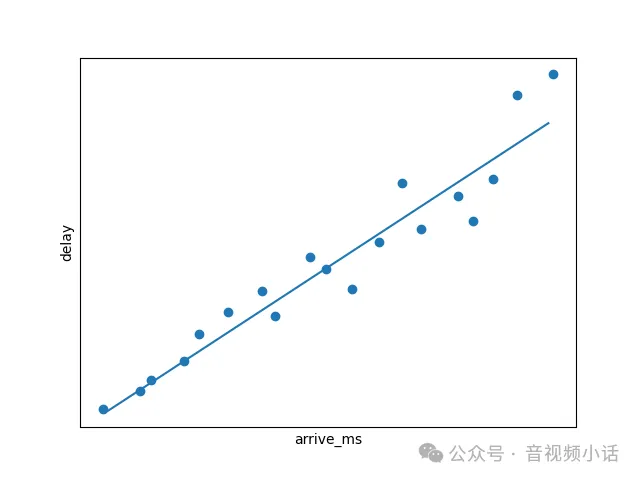
上图是模拟的打点,所有的打点,正常情况下,能用最小二乘法绘制出一条直线:
y = m * x
其中
y: delay
x: arrive_ms
m: 斜率对于上面公式汇总的斜率m,就能得到如何估计未来的bitrate变化状态:
- m > threshold_max: m大于某个阈值,表示delay增加严重,需要降低编码bitrate;
- m < threshold_min: m小于某个阈值,表示delay减少很多,表示可以增加编码bitrate
- threshold_min < m < threshold_max: m在两个阈值之间,保持编码bitrate不变
上面这个公式中的斜率m就是趋势滤波估计带宽的基础,整个趋势滤波就是通过求斜率m,来推定下一步的带宽状态。
需要的基础数据集就是:
* x横坐标: arrive_ms
* y纵坐标:累积delay值
x和y都是通过rtcp tcc能拿到的数据,通过最小二乘法,就能得到斜率m,是不是比卡曼滤波简单很多。
3.1 趋势滤波的源码实现
3.1.1 数据准备
在函数UpdateTrendline中,输入4个参数。
void TrendlineEstimator::UpdateTrendline(
double recv_delta_ms,
double send_delta_ms,
int64_t send_time_ms,
int64_t arrival_time_ms)再次提到延时公式:Delay(i) = {t(i) – t(i-1)} – {T(i) – T(i-1)}
函数输入的4个参数。
- recv_delta_ms: 接收端收到连续两批rtp报文的时间差,也就是t(i) – t(i-1);
- send_delta_ms: 发送端发送两批rtp报文的时间差,也就是T(i) – T(i-1);
- send_time_ms: 发送端发送rtp报文的系统时间;
- arrival_time_ms: 接收端收到rtp报文的系统时间;
有这4个关键参数,就可以录入数据到一个链表delay_hist_中去。
具体代码如下,加上了详细的注释。
void TrendlineEstimator::UpdateTrendline(
double recv_delta_ms,
double send_delta_ms,
int64_t send_time_ms,
int64_t arrival_time_ms)
{
//delta_ms这个就是delay,也就是延时
const double delta_ms = recv_delta_ms - send_delta_ms;
//accumulated_delay_每次加上delta_ms,就是累积延时
accumulated_delay_ += delta_ms;
//smoothed_delay_是简单滤波后的累积延时,
//其中滤波参数是smoothing_coef_=0.9
//用滤波参数的方式,防止错误延时数据对整体的影响
smoothed_delay_ = smoothing_coef_ * smoothed_delay_ +
(1 - smoothing_coef_) * accumulated_delay_;
//这个数组非常重要,就是我们要画图的原始数据
//其中x坐标轴,就是接收端到达的时间
//x坐标轴数据点 = static_cast<double>(arrival_time_ms - first_arrival_time_ms_),
//y坐标轴,就是累积延时,
//y坐标轴数据点 = smoothed_delay_(经过简单滤波的累积延时)
delay_hist_.emplace_back(
static_cast<double>(arrival_time_ms - first_arrival_time_ms_),
smoothed_delay_, accumulated_delay_);
}如上,数组delay_hist_就是原始数据集:
- x坐标: 接收端达到的系统时间,arrival_time_ms – first_arrival_t
- y坐标:累积延时,smoothed_delay_,也就是简单滤波后的累积延时
3.1.2 计算斜率
在3.1.1中,我们积累数据到delay_hist_数组中,累积了x坐标数据,和y坐标数据,接下来,我们就可以计算斜率trend。
if (delay_hist_.size() > settings_.window_size)
delay_hist_.pop_front();//删除旧的数据
//如果队列长度等于窗口大小
if (delay_hist_.size() == settings_.window_size) {
//开始计算斜率
}如上代码,delay_hist_有个窗口的大小,在每次添加新的数据后,如果delay_hist_数组的长度大于窗口大小,就去除最老的数据,以此保留最新的数据。
如果delay_hist_数据的长度等于窗口大小,就可以开始计算斜率了。
通过协方差与方差,来计算出斜率的公式:
y = b * x + c,
已知x和y的n个序列值,通过方差和协方差的关系,可以求斜率:
b = Cov(X, Y) / Var(X)
斜率也就是:
∑((x(i) − avg_x) (y(i) - avg_y))
b = -------------------------------------
∑(x(i)- avg_x)^2计算斜率具体的代码在LinearFitSlope这个函数里:
double LinearFitSlope(
const std::deque<TrendlineEstimator::PacketTiming>& packets)
{
//第一步,求出x和y的平均值
//先求出x,y的各个值的总和
for (const auto& packet : packets) {
sum_x += packet.arrival_time_ms;
sum_y += packet.smoothed_delay_ms;
}
//求出x和y的平均值
double x_avg = sum_x / packets.size();
double y_avg = sum_y / packets.size();
//得出斜率的分子,和分母
double numerator = 0;
double denominator = 0;
for (const auto& packet : packets) {
double x = packet.arrival_time_ms;
double y = packet.smoothed_delay_ms;
//numerator就是:∑((x(i) − avg_x) (y(i) - avg_y))
numerator += (x - x_avg) * (y - y_avg);
//denominator就是:∑(x(i)- avg_x)^2
denominator += (x - x_avg) * (x - x_avg);
}
//这个就是斜率
// ∑((x(i) − avg_x) (y(i) - avg_y))
//b = -------------------------------------
// ∑(x(i)- avg_x)^2
return numerator / denominator;
}上面的代码就是计算斜率的过程,最终得到斜率。
3.1.3 斜率决定带宽状态
得出斜率后,用斜率与threshold进行比较,决定带宽当前的状态
- OverUsing: 带宽过度使用,需要降低编码bitrate;
- UnderUsing: 带宽轻度使用,需要增加编码bitrate:
- Normal: 带宽正常,保持状态
代码在函数TrendlineEstimator::Detect中实现,trend为输入值
void TrendlineEstimator::Detect(double trend, double ts_delta, int64_t now_ms)
{
//原始d的斜率trend * 采样个数 * 斜率增益,得到一个新斜率值与阈值threshold比较
const double modified_trend =
std::min(num_of_deltas_, kMinNumDeltas) * trend * threshold_gain_;
if (modified_trend > threshold_) {
//过度使用,需要降低编码bitrate;
hypothesis_ = BandwidthUsage::kBwOverusing;
} else if (modified_trend < -threshold_) {
//轻度使用,需要增加编码bitrate:
hypothesis_ = BandwidthUsage::kBwUnderusing;
} else {
//保持状态
hypothesis_ = BandwidthUsage::kBwNormal;
}
//每次更新阈值threshold
UpdateThreshold(modified_trend, now_ms);
}这里就能得出下一步带宽预测的结果,就可以指导是否减少/增加/保持视频编码的bitrate。
3.1.4 更新阈值Threshold
Threshold在每次斜率更新后,也要进行对应的调整,对下一步斜率的变化,调整准确和敏感。
在函数UpdateThreshold中调整对应的threshold_。
void TrendlineEstimator::UpdateThreshold(double modified_trend,
int64_t now_ms) {
// ... ...
const double k = fabs(modified_trend) < threshold_
? k_down_ : k_up_;
const int64_t kMaxTimeDeltaMs = 100;
int64_t time_delta_ms = std::min(now_ms - last_update_ms_,
kMaxTimeDeltaMs);
threshold_ += k * (fabs(modified_trend) - threshold_)
* time_delta_ms;
threshold_ = rtc::SafeClamp(threshold_, 6.f, 600.f);
last_update_ms_ = now_ms;
}其中调整threshold的增益参数k,有两个值选择:k_down_(0.039)和k_up_(0.0087)。
明显k_down_远大于k_up_,其含义是下降的threshold比上升的threshold要敏感更多;遇到斜率需要降低带宽更敏感一些,增加带宽就更谨慎一些。
自己也可以写改这两个值,达到自己想要的流控目的。
4. webrtc tcc的优缺点
优点:
- 发送端有rtp全面的信息,方便做拥塞控制算法
webrtc tcc在接收端统计每个rtp报文的wide seq和到达的系统时间,并且把这些信息打包成rtcp tcc发给发送端,这样发送端拥有的信息比较全,方便做后续的拥塞控制算法。
除了趋势滤波算法,后面还能有更多的算法可以选择,后续灵活性更好。
- 趋势滤波的准确度更高
趋势滤波是基于全数据来进行斜率计算,与卡曼滤波是有些不同。卡曼滤波是递归/递增的方式,并不是使用全数据的方式来进行估计。趋势滤波是基于窗口内的全数据来进行计算斜率趋势,更加准确一些。
缺点:
趋势滤波的计算消耗,相对卡曼滤波比较大。卡曼滤波是递归,递增方式来计算估计值,并不存储数据,每次计算没有针对数据集,没有任何循环计算。
而趋势滤波不一样,需要存储一个settings_.window_size的数据,每次计算斜率都会至少 2 x window_size次的循环来计算新的斜率,也就是每收到一次新的数据,都有2 x window_size 的循环来进行计算,对cpu有损耗。这个对于递增类型的卡曼滤波是不存在的。
5. 总结
本文具体消息描述了:
- webrtc tcc架构
webrtc tcc技术,是在接收端统计发送rtp报文的wide seq,到达系统时间。接收端通过rtcp tcc报文发给发送端后,发送端计算出:(y纵坐标)累积delay,(x横坐标)到达的arrive_ms,随后计算出斜率,通过斜率预测出未来的带宽状态
- 趋势滤波算法
趋势滤波算法,数据集为:
(y纵坐标)累积delay,(x横坐标)到达的arrive_ms。
斜率大于某个阈值,带宽过度使用;
斜率小于某个阈值,带宽轻度使用;
否则,带宽保持原状态。
通过(y纵坐标)和(x横坐标)的数据集,通过协方差和方差的计算得到斜率:
trend = Cov(X, Y)/Var(X)
如果trend > threshold, 带宽过载,需要调低编码bitrate;
如果trend < -threshold,带宽轻载,需要调高编码bitrate;
否则,带宽正常,保持编码bitrate。
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。
