
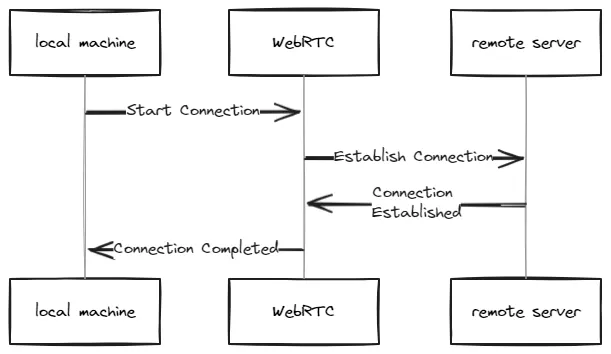
本文分享如何使用 Python 建立 WebRTC 连接,以便将摄像头帧从一台机器流式传输到另一台机器。WebRTC(Web实时通信)可实现点对点通信,是实时视频流等任务的理想选择。

前提条件
- 在发送方和接收方计算机上安装 Python。
- Python 编程基础知识。
- 可使用终端或命令行界面。
设置环境:
首先安装必要的库。运行以下命令安装所需的依赖库:
pip install aiortc opencv-python发送脚本(远程机器)
发送脚本从摄像头捕捉视频帧并将其发送到接收方。以下是 sender.py 脚本:
import asyncio
import cv2
from aiortc import RTCPeerConnection, RTCSessionDescription, VideoStreamTrack
from aiortc.contrib.signaling import TcpSocketSignaling
from av import VideoFrame
import fractions
from datetime import datetime
class CustomVideoStreamTrack(VideoStreamTrack):
def __init__(self, camera_id):
super().__init__()
self.cap = cv2.VideoCapture(camera_id)
self.frame_count = 0
async def recv(self):
self.frame_count += 1
print(f"Sending frame {self.frame_count}")
ret, frame = self.cap.read()
if not ret:
print("Failed to read frame from camera")
return None
frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
video_frame = VideoFrame.from_ndarray(frame, format="rgb24")
video_frame.pts = self.frame_count
video_frame.time_base = fractions.Fraction(1, 30) # Use fractions for time_base
# Add timestamp to the frame
timestamp = datetime.now().strftime("%Y-%m-%d %H:%M:%S.%f")[:-3] # Current time with milliseconds
cv2.putText(frame, timestamp, (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA)
frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
video_frame = VideoFrame.from_ndarray(frame, format="rgb24")
video_frame.pts = self.frame_count
video_frame.time_base = fractions.Fraction(1, 30) # Use fractions for time_base
return video_frame
async def setup_webrtc_and_run(ip_address, port, camera_id):
signaling = TcpSocketSignaling(ip_address, port)
pc = RTCPeerConnection()
video_sender = CustomVideoStreamTrack(camera_id)
pc.addTrack(video_sender)
try:
await signaling.connect()
@pc.on("datachannel")
def on_datachannel(channel):
print(f"Data channel established: {channel.label}")
@pc.on("connectionstatechange")
async def on_connectionstatechange():
print(f"Connection state is {pc.connectionState}")
if pc.connectionState == "connected":
print("WebRTC connection established successfully")
offer = await pc.createOffer()
await pc.setLocalDescription(offer)
await signaling.send(pc.localDescription)
while True:
obj = await signaling.receive()
if isinstance(obj, RTCSessionDescription):
await pc.setRemoteDescription(obj)
print("Remote description set")
elif obj is None:
print("Signaling ended")
break
print("Closing connection")
finally:
await pc.close()
async def main():
ip_address = "xxx.xxx.xx.xx" # Ip Address of Remote Server/Machine
port = 9999
camera_id = 2 # Change this to the appropriate camera ID
await setup_webrtc_and_run(ip_address, port, camera_id)
if __name__ == "__main__":
asyncio.run(main())接收方脚本(本地机器)
接收方脚本从发送方接收视频帧并将其显示出来。以下是 receiver.py 脚本:
import asyncio
import cv2
import numpy as np
from aiortc import RTCPeerConnection, RTCSessionDescription, MediaStreamTrack
from aiortc.contrib.signaling import TcpSocketSignaling
from av import VideoFrame
from datetime import datetime, timedelta
class VideoReceiver:
def __init__(self):
self.track = None
async def handle_track(self, track):
print("Inside handle track")
self.track = track
frame_count = 0
while True:
try:
print("Waiting for frame...")
frame = await asyncio.wait_for(track.recv(), timeout=5.0)
frame_count += 1
print(f"Received frame {frame_count}")
if isinstance(frame, VideoFrame):
print(f"Frame type: VideoFrame, pts: {frame.pts}, time_base: {frame.time_base}")
frame = frame.to_ndarray(format="bgr24")
elif isinstance(frame, np.ndarray):
print(f"Frame type: numpy array")
else:
print(f"Unexpected frame type: {type(frame)}")
continue
# Add timestamp to the frame
current_time = datetime.now()
new_time = current_time - timedelta( seconds=55)
timestamp = new_time.strftime("%Y-%m-%d %H:%M:%S.%f")[:-3]
cv2.putText(frame, timestamp, (10, frame.shape[0] - 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA)
cv2.imwrite(f"imgs/received_frame_{frame_count}.jpg", frame)
print(f"Saved frame {frame_count} to file")
cv2.imshow("Frame", frame)
# Exit on 'q' key press
if cv2.waitKey(1) & 0xFF == ord('q'):
break
except asyncio.TimeoutError:
print("Timeout waiting for frame, continuing...")
except Exception as e:
print(f"Error in handle_track: {str(e)}")
if "Connection" in str(e):
break
print("Exiting handle_track")
async def run(pc, signaling):
await signaling.connect()
@pc.on("track")
def on_track(track):
if isinstance(track, MediaStreamTrack):
print(f"Receiving {track.kind} track")
asyncio.ensure_future(video_receiver.handle_track(track))
@pc.on("datachannel")
def on_datachannel(channel):
print(f"Data channel established: {channel.label}")
@pc.on("connectionstatechange")
async def on_connectionstatechange():
print(f"Connection state is {pc.connectionState}")
if pc.connectionState == "connected":
print("WebRTC connection established successfully")
print("Waiting for offer from sender...")
offer = await signaling.receive()
print("Offer received")
await pc.setRemoteDescription(offer)
print("Remote description set")
answer = await pc.createAnswer()
print("Answer created")
await pc.setLocalDescription(answer)
print("Local description set")
await signaling.send(pc.localDescription)
print("Answer sent to sender")
print("Waiting for connection to be established...")
while pc.connectionState != "connected":
await asyncio.sleep(0.1)
print("Connection established, waiting for frames...")
await asyncio.sleep(100) # Wait for 35 seconds to receive frames
print("Closing connection")
async def main():
signaling = TcpSocketSignaling("192.168.30.40", 9999)
pc = RTCPeerConnection()
global video_receiver
video_receiver = VideoReceiver()
try:
await run(pc, signaling)
except Exception as e:
print(f"Error in main: {str(e)}")
finally:
print("Closing peer connection")
await pc.close()
if __name__ == "__main__":
asyncio.run(main())运行脚本:
在带有摄像头的远程机器上运行发送方脚本:
python sender.py在您想要显示视频帧的机器上运行接收方脚本:
python receiver.py结束语
至此您已成功建立了 WebRTC 连接,可以使用 Python 将摄像头帧从一台机器流式传输到另一台机器。本示例为更高级的应用(如远程监控和视频会议)奠定了基础。您可以根据自己的需要对本项目进行定制和扩展。
要深入了解代码,请查看 GitHub 上的项目库:https://github.com/eknathmali/Real-Time-Video-Streaming-with-WebRTC-and-Python
作者:Eknath Bhagwan Mali
本文来自作者投稿,版权归原作者所有。如需转载,请注明出处:https://www.nxrte.com/jishu/webrtc/50551.html