
本文作者汇总了一下webrtc中的常用算法。关于算法的实现原理,列了一些网上资料,如果想深入研究的同学,可以自己看看。
主要算法有:
指数平滑、双线性插值、卡尔曼滤波、贝叶斯预测
今天先分享一下指数平滑和卡尔曼滤波的学习资料。
1、指数平滑,一次指数、二次指数平滑
主要用来平滑一些抖动数据,如rtt、丢包率等。参考链接:https://blog.51cto.com/u_15054042/4745278
公式:
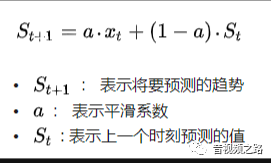

webrtc中的实现:
float ExpFilter::Apply(float exp, float sample) {
if (filtered_ == kValueUndefined) {
// Initialize filtered value.
filtered_ = sample;
} else if (exp == 1.0) {
filtered_ = alpha_ * filtered_ + (1 - alpha_) * sample;
} else {
float alpha = std::pow(alpha_, exp);
filtered_ = alpha * filtered_ + (1 - alpha) * sample;
}
if (max_ != kValueUndefined && filtered_ > max_) {
filtered_ = max_;
}
return filtered_;
}基本思想:
预测值是以前观测值的加权和,且对不同的数据给予不同的权,新数据给较大的权,旧数据给较小的权。
基本原理:
指数平滑法是移动平均法中的一种,其特点在于给过去的观测值不一样的权重。较近期观测值的权重数比较远期观测值的权数要大。
根据平滑次数不同,指数平滑法分为一次指数平滑法、二次指数平滑法和三次指数平滑法等。
但它们的基本思想都是:预测值是以前观测值的加权和,且对不同的数据给予不同的权数,新数据给予较大的权数,旧数据给予较小的权数。
指数平滑法对实际序列具有平滑作用,权系数(平滑系数)a 越小,平滑作用越强,但对实际数据的变动反应较迟缓。
指数平滑值出现滞后偏差的程度随着权系数(平滑系数)a 的增大而减少,但当时间序列的变动出现直线趋势时,用一次指数平滑法来进行预测仍将存在着明显的滞后偏差。
平滑之后的数据存在偏差怎么办?需要修正,修正的方法是在一次指数平滑的基础上再进行二次指数平滑。
2、卡尔曼滤波首推B站DR_CAN的教程
链接:https://www.bilibili.com/video/BV1ez4y1X7eR/
webrtc中卡尔曼算法的实现,主要用来平滑帧的抖动延时。
jitter_estimator.cc:
// Updates Kalman estimate of the channel.
// The caller is expected to sanity check the inputs.
void VCMJitterEstimator::KalmanEstimateChannel(int64_t frameDelayMS,
int32_t deltaFSBytes) {
double Mh[2];
double hMh_sigma;
double kalmanGain[2];
double measureRes;
double t00, t01;
// Kalman filtering
// Prediction
// M = M + Q
_thetaCov[0][0] += _Qcov[0][0];
_thetaCov[0][1] += _Qcov[0][1];
_thetaCov[1][0] += _Qcov[1][0];
_thetaCov[1][1] += _Qcov[1][1];
// Kalman gain
// 这里 M 是PK-
// h'是H的转置
// K = M*h'/(sigma2n + h*M*h') = M*h'/(1 + h*M*h')
// h = [dFS 1]
// Mh = M*h' 分子部分
// hMh_sigma = h*M*h' + R 分母部分
Mh[0] = _thetaCov[0][0] * deltaFSBytes + _thetaCov[0][1];
Mh[1] = _thetaCov[1][0] * deltaFSBytes + _thetaCov[1][1];
// sigma weights measurements with a small deltaFS as noisy and
// measurements with large deltaFS as good
if (_maxFrameSize < 1.0) {
return;
}
double sigma = (300.0 * exp(-fabs(static_cast<double>(deltaFSBytes)) /
(1e0 * _maxFrameSize)) +
1) *
sqrt(_varNoise);
if (sigma < 1.0) {
sigma = 1.0;
}
hMh_sigma = deltaFSBytes * Mh[0] + Mh[1] + sigma;
if ((hMh_sigma < 1e-9 && hMh_sigma >= 0) ||
(hMh_sigma > -1e-9 && hMh_sigma <= 0)) {
assert(false);
return;
}
kalmanGain[0] = Mh[0] / hMh_sigma;
kalmanGain[1] = Mh[1] / hMh_sigma;
// Correction
// theta = theta + K*(dT - h*theta)
measureRes = frameDelayMS - (deltaFSBytes * _theta[0] + _theta[1]);
_theta[0] += kalmanGain[0] * measureRes;
_theta[1] += kalmanGain[1] * measureRes;
if (_theta[0] < _thetaLow) {
_theta[0] = _thetaLow;
}
// M = (I - K*h)*M
t00 = _thetaCov[0][0];
t01 = _thetaCov[0][1];
_thetaCov[0][0] = (1 - kalmanGain[0] * deltaFSBytes) * t00 -
kalmanGain[0] * _thetaCov[1][0];
_thetaCov[0][1] = (1 - kalmanGain[0] * deltaFSBytes) * t01 -
kalmanGain[0] * _thetaCov[1][1];
_thetaCov[1][0] = _thetaCov[1][0] * (1 - kalmanGain[1]) -
kalmanGain[1] * deltaFSBytes * t00;
_thetaCov[1][1] = _thetaCov[1][1] * (1 - kalmanGain[1]) -
kalmanGain[1] * deltaFSBytes * t01;
// Covariance matrix, must be positive semi-definite.
assert(_thetaCov[0][0] + _thetaCov[1][1] >= 0 &&
_thetaCov[0][0] * _thetaCov[1][1] -
_thetaCov[0][1] * _thetaCov[1][0] >=
0 &&
_thetaCov[0][0] >= 0);
}作者:音视频之路
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。