
一、背景介绍
拍照是手机的基本功能,优化拍照性能,主要是优化点击拍照到生成照片的这一段时间,看看可以在什么地方减少耗时下面将打开camera到拍照完成这段时间拆解一下
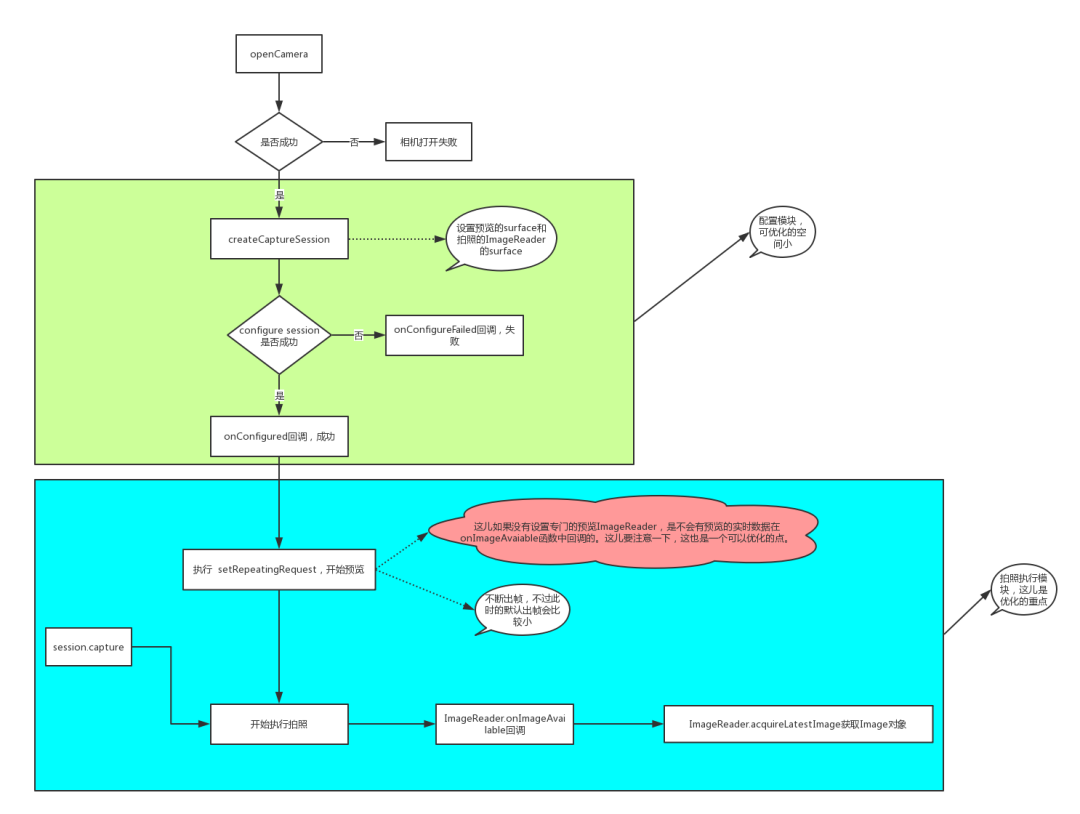
这段过程主要分为:
- capture session配置阶段:这是预览之前的阶段
- 预览流程:这段时间,camera不断出帧,显示在TextureView上
- 拍照流程:点击拍照到最终生效图片的流程
Note:将预览流程与拍照流程合成一个大的流程,因为我们本文所说的优化重点就在这里
二、核心思想
预览出帧是为了让用户感觉到此时camera正在运行,但是预览的帧数据是不能直接用作拍照的帧数据,为什么?因为预览的帧数据太小,拍照的帧数据很大,所以不能直接复用。那如果能直接复用呢?
就是预览的帧数据可以直接被拍照来使用
这也是我们本文讨论的重点,直接复用预览的帧数据
直接复用预览的帧数据,那么首先需要保证的是预览帧的大小必须和实际拍照的帧大小是相同的,不然获取的预览帧数据也是没用的,没有意义
预览的surface我们需要自定义,而且大小要和拍照的ImageReader的surface大小相同的
2.1 定义Yuv Full ImageReader
private ImageReader mYuv1ImageReader;
初始化的时候需要创建这个 ImageReader的实例:
mYuv1ImageReader = ImageReader.newInstance(
mCameraInfoCache.getYuvStream1Size().getWidth(),
mCameraInfoCache.getYuvStream1Size().getHeight(),
ImageFormat.YUV_420_888,
YUV1_IMAGEREADER_SIZE
);
mYuv1ImageReader.setOnImageAvailableListener(mYuv1ImageListener, mOpsHandler);
2.2 ImageReader的监听回调
ImageReader.OnImageAvailableListener mYuv1ImageListener =
new ImageReader.OnImageAvailableListener() {
@Override
public void onImageAvailable(ImageReader reader) {
Image img = reader.acquireLatestImage();
if (img == null) {
Log.e(TAG, "Null image returned YUV1");
return;
}
if (mYuv1LastReceivedImage != null) {
mYuv1LastReceivedImage.close();
}
mYuv1LastReceivedImage = img;
if (++mYuv1ImageCounter % LOG_NTH_FRAME == 0) {
Log.v(TAG, "YUV1 buffer available, Frame #=" + mYuv1ImageCounter + " w=" + img.getWidth() + " h=" + img.getHeight() + " time=" + img.getTimestamp());
}
}
}
};
只要是处于预览状态,底层的sensor会一直出帧数据,这个onImageAvailable(ImageReader reader)会一直回调
2.3 定义实时的Image返回值
// Handle to last received Image: allows ZSL to be implemented.
private Image mYuv1LastReceivedImage = null;
这个mYuv1LastReceivedImage从定义的变量名上就能看出来,是预览的最后一帧的数据,显然这个帧数据是完全的,和出图的大小完全一样的
mYuv1LastReceivedImage保证本地总是存储预览的最后一帧数据
2.4 创建captureSession
Camera打开的时候onOpened回调的时候,开始创建captureSession:
private CameraDevice.StateCallback mCameraStateCallback = new LoggingCallbacks.DeviceStateCallback() {
@Override
public void onOpened(CameraDevice camera) {
super.onOpened(camera);
startCaptureSession();
}
};
// Create CameraCaptureSession. Callback will start repeating request with current parameters.
private void startCaptureSession() {
Log.v(TAG, "Configuring session..");
List<Surface> outputSurfaces = new ArrayList<Surface>(4);
// Config outputSurfaces...略
try {
if (USE_REPROCESSING_IF_AVAIL && mCameraInfoCache.isYuvReprocessingAvailable()) {
InputConfiguration inputConfig = new InputConfiguration(mCameraInfoCache.getYuvStream1Size().getWidth(),
mCameraInfoCache.getYuvStream1Size().getHeight(), ImageFormat.YUV_420_888);
mCameraDevice.createReprocessableCaptureSession(inputConfig, outputSurfaces,
mSessionStateCallback, null);
Log.v(TAG, " Call to createReprocessableCaptureSession complete.");
} else {
mCameraDevice.createCaptureSession(outputSurfaces, mSessionStateCallback, null);
Log.v(TAG, " Call to createCaptureSession complete.");
}
} catch (CameraAccessException e) {
Log.e(TAG, "Error configuring ISP.");
}
}
使用zsl的方式的话,就需要输入InputConfiguration配置数据,好让底层的camera hal复用这部分数据,我们也能真正达到zsl的目的
InputConfiguration inputConfig = new InputConfiguration(mCameraInfoCache.getYuvStream1Size().getWidth(),
mCameraInfoCache.getYuvStream1Size().getHeight(), ImageFormat.YUV_420_888);
mCameraDevice.createReprocessableCaptureSession(inputConfig, outputSurfaces,
mSessionStateCallback, null);
mSessionStateCallback是当前captureSession所处状态的回调,我们会在captureSession的onReady回调函数中设置ImageWriter对象:
ImageWriter mImageWriter;
private CameraCaptureSession.StateCallback mSessionStateCallback = new LoggingCallbacks.SessionStateCallback() {
@Override
public void onReady(CameraCaptureSession session) {
Log.v(TAG, "capture session onReady(). HAL capture session took: (" + (SystemClock.elapsedRealtime() - CameraTimer.t_session_go) + " ms)");
mCurrentCaptureSession = session;
issuePreviewCaptureRequest(false);
if (session.isReprocessable()) {
mImageWriter = ImageWriter.newInstance(session.getInputSurface(), IMAGEWRITER_SIZE);
mImageWriter.setOnImageReleasedListener(
new ImageWriter.OnImageReleasedListener() {
@Override
public void onImageReleased(ImageWriter writer) {
Log.v(TAG, "ImageWriter.OnImageReleasedListener onImageReleased()");
}
}, null);
Log.v(TAG, "Created ImageWriter.");
}
super.onReady(session);
}
};
session.getInputSurface() 表示之前输入的inputConfiguration数据,这个数据暂时初始化放在ImageWriter中
后续每次得到的预览的最后一帧数据都会放在ImageWriter对象中,直接送入到底层
2.5 设置预览
CaptureRequest.Builder b1 = mCameraDevice.createCaptureRequest(CameraDevice.TEMPLATE_PREVIEW);
b1.addTarget(mYuv1ImageReader.getSurface());
mCurrentCaptureSession.setRepeatingRequest(b1.build(), mCaptureCallback, mOpsHandler);
传入了初始定义的full yuv的ImageReader的surface结构,然后在CaptureCallback中需要获取captureResult,这个数据在拍照的时候还有用处
2.6 CaptureCallback处理
private CameraCaptureSession.CaptureCallback mCaptureCallback = new LoggingCallbacks.SessionCaptureCallback() {
@Override
public void onCaptureCompleted(CameraCaptureSession session, CaptureRequest request, TotalCaptureResult result) {
if (!mFirstFrameArrived) {
mFirstFrameArrived = true;
long now = SystemClock.elapsedRealtime();
long dt = now - CameraTimer.t0;
long camera_dt = now - CameraTimer.t_session_go + CameraTimer.t_open_end - CameraTimer.t_open_start;
long repeating_req_dt = now - CameraTimer.t_burst;
Log.v(TAG, "App control to first frame: (" + dt + " ms)");
Log.v(TAG, "HAL request to first frame: (" + repeating_req_dt + " ms) " + " Total HAL wait: (" + camera_dt + " ms)");
mMyCameraCallback.receivedFirstFrame();
mMyCameraCallback.performanceDataAvailable((int) dt, (int) camera_dt, null);
}
publishFrameData(result);
// Used for reprocessing.
mLastTotalCaptureResult = result;
super.onCaptureCompleted(session, request, result);
}
};
这个mLastTotalCaptureResult是预览capture的时候捕获的一个captureResult,后续处理的时候会用到
// Last total capture result
TotalCaptureResult mLastTotalCaptureResult;
2.7 拍照处理
终于来到了最核心的步骤,这儿的拍照处理,当然不会像之前那样直接调用CaptureSession的capture方法,因为执行capture方法,就必定要重新发送capture request,重新获取帧数据
但是我们现在已经有了帧数据,就是之前保存的帧数据,这时候帧数据就起到了非常重要的作用
void runReprocessing() {
if (mYuv1LastReceivedImage == null) {
Log.e(TAG, "No YUV Image available.");
return;
}
mImageWriter.queueInputImage(mYuv1LastReceivedImage);
Log.v(TAG, " Sent YUV1 image to ImageWriter.queueInputImage()");
try {
CaptureRequest.Builder b1 = mCameraDevice.createReprocessCaptureRequest(mLastTotalCaptureResult);
// Todo: Read current orientation instead of just assuming device is in native orientation
b1.set(CaptureRequest.JPEG_ORIENTATION, mCameraInfoCache.sensorOrientation());
b1.set(CaptureRequest.JPEG_QUALITY, (byte) 95);
b1.set(CaptureRequest.NOISE_REDUCTION_MODE, mReprocessingNoiseMode);
b1.set(CaptureRequest.EDGE_MODE, mReprocessingEdgeMode);
b1.addTarget(mJpegImageReader.getSurface());
mCurrentCaptureSession.capture(b1.build(), mReprocessingCaptureCallback, mOpsHandler);
mReprocessingRequestNanoTime = System.nanoTime();
} catch (CameraAccessException e) {
Log.e(TAG, "Could not access camera for issuePreviewCaptureRequest.");
}
mYuv1LastReceivedImage = null;
Log.v(TAG, " Reprocessing request submitted.");
}
mImageWriter.queueInputImage(mYuv1LastReceivedImage);
将预览最后一帧数据放入ImageWriter的input 队列中
// Reprocessing capture completed.
private CameraCaptureSession.CaptureCallback mReprocessingCaptureCallback = new LoggingCallbacks.SessionCaptureCallback() {
@Override
public void onCaptureCompleted(CameraCaptureSession session, CaptureRequest request, TotalCaptureResult result) {
Log.v(TAG, "Reprocessing onCaptureCompleted()");
}
};
处理完成之后回调onCaptureCompleted(…)函数
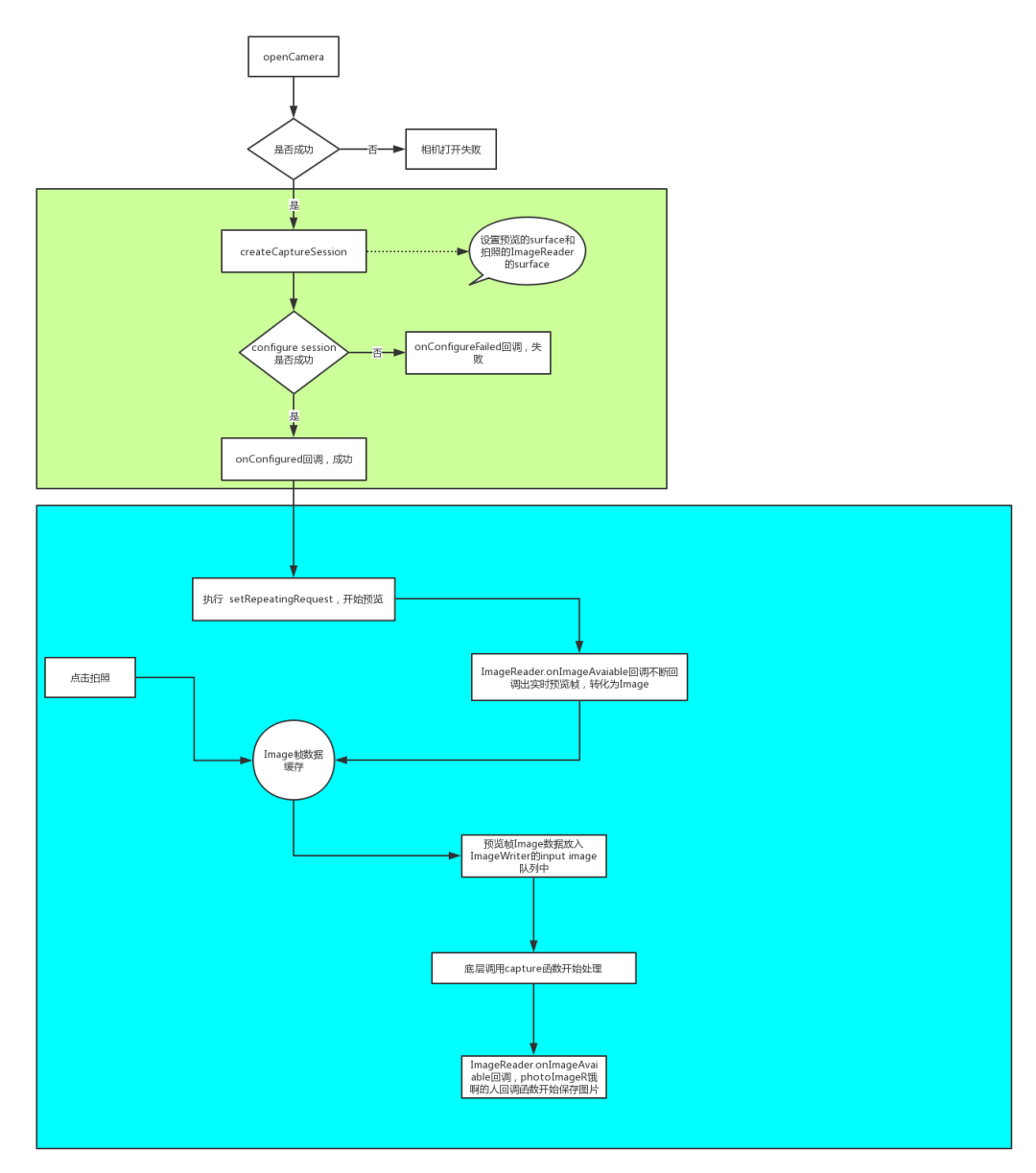
三、总结
zsl方案有多快:原图拍照一张150ms,快得一笔,下面是截图样例:

优化之后的流程可以总结成如下:
作者:码上就说
链接:https://www.jianshu.com/p/3beb7403025f
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。
