
主动声音控制(Active Sound Control, ASC)在当今已应用于许多实际噪声控制,包括汽车发动机和道路噪声控制、螺旋桨飞机降噪以及降噪耳机等。尽管该技术的研究和开发历史悠久,但其科学理解和技术发展仍在不断进步。
主动声音控制的基本原理
主动声控基于波的干涉原理,即两个或多个声源产生的波相互干涉,形成所需的声场分布。这一原理最早由杨氏(Young,1804)在光的干涉实验中提出,并由瑞利勋爵(Lord Rayleigh,Strutt,1878)扩展到声波。主动声控的关键在于通过精确控制次级声源的相位和幅度,实现噪声的消除或增强。
噪声消除
通过相位相反的两个声波的干涉,可以实现噪声的消除。如图1上图展示了两个相位相反的正弦波信号相互叠加后,总声压为零的情况。
值得注意的是,这个概念不仅限于正弦波信号,原则上可以扩展到任意主信号(例如语音),只要能够生成次级信号以精确消除主信号。
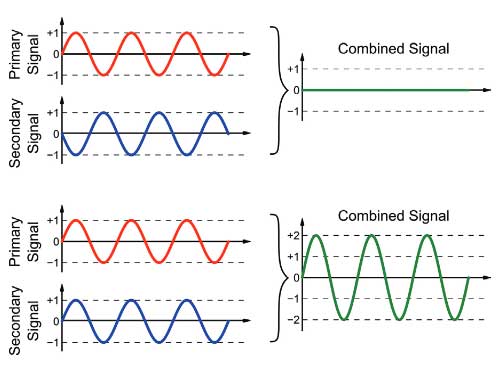
声音增强
相位相同的两声波相互干涉,可以增强总声压。图1下图展示了两个相位相同的正弦波信号相互叠加后,总声压加倍的情况。
这同时也体现了叠加原理的另一个基本后果(这在主动噪声控制的语境中讨论较少,但在更广泛的主动声音控制中是相关的)。在这种情况下,两个正弦波信号相位相同,导致两个信号之间的构造性干涉以及组合信号幅度的加倍。
这一原理被应用于各种主动声音控制应用,包括主动声音均衡(Kuo & Ji,1995),其中主动控制不仅可以用来减弱不需要的噪声,还可以用来增强想要的噪声。例如,这些技术可以用来主动修改内燃机的声学特性,使低功率发动机听起来更具运动感(Samarasinghe et al.,2016)。
在主动声音控制系统中,一个常见的误解是,为了“消除”声音,次级声源需要与初级声源完全反相。然而,如图2下图所示,当初级和次级声源不在同一点时,整个空间的消声效果并不理想。在实际应用中,次级声源需要被驱动,以便在所需的目标位置产生所需的声压降低或增强。
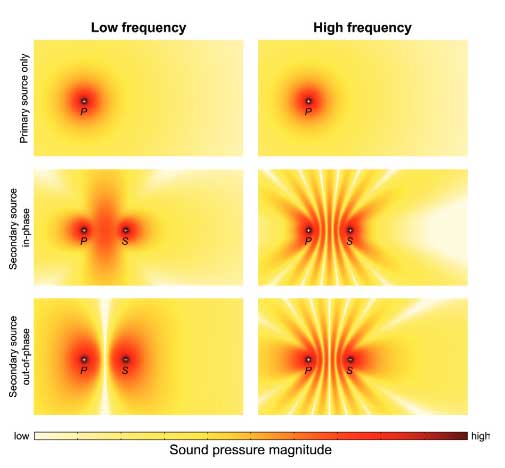
图2.原始源(P)和次级源(S)辐射的声音压力场,作为单极源,在低频和高频下模拟进入三维自由场。源之间的间距等于低频时声波长的0.7倍,高频时是3.5倍。上图:仅由原始源辐射出的场。中图:次级声源与主声源同相位辐射声音。下图:次级声源与主声源相位相反。
由于许多实际情况中,初级声源并非单点作用,而是分布在空间中的,因此单个次级声源无法产生足够的复杂声波来完全抵消初级声源。因此,我们需要至少一个次级声源,并且该声源必须相对于初级声源以一定的相位关系被驱动,以实现所需的声场。
能量平衡与声学干涉
在主动噪声控制中,人们经常会关心声场中的能量平衡。当声场发生干涉时,某些区域的声压会降低,而在其他区域则会增加。
如图3中图所示,尽管可以在管道中的某些区域通过单个次级声源降低声压,但在其他位置声压会增加。在能量流方面,流线图表明声能只向左传播,但能量在空间中如何重新分配是一个复杂的问题。
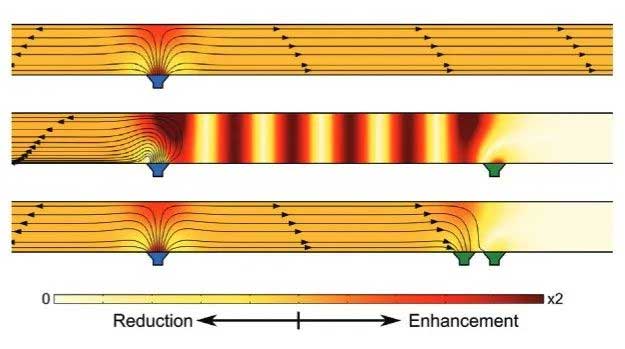
图3.声压大小(色阶图)和由于单个主要声源(上)、使用单个次级声源的主动声控制(中)以及使用一对次级声源进行主动声控制(下)而在管道中产生的声压幅度(彩色等值线)和声能的稳态流动(黑色流线和箭头)。
为了在管道的右侧实现完全的声学消除,而不引入驻波场或增加声压的区域,需要引入一个额外的次声源,如图3下图所示。
原始的次声源现在被驱动来抵消由主声源和额外的次声源产生的声波,这些声波位于次声源右侧。额外的次声源被驱动来抵消由原始次声源左侧辐射的声波。
在这种情况下,次声源右侧的压力场被完全抵消,而初级和次级声源之间的压力场现在被控制所改变。这个系统中的总声能明显减少,但能量去向何方?
流线显示,初级源辐射的声能向两个方向传播,但朝向次级源的能量则流入第一个次级源,并沿着管道进一步传播。这种控制策略通常被称为主动吸收控制,因为次级源吸收了声能。能量被吸收的机制取决于次级源的性质。
历史与发展
主动噪声控制的概念可以追溯到20世纪30年代,Lueg的专利(1933)被认为是该领域的基石。该系统利用麦克风、放大器和扬声器来检测并消除噪声。然而,直到20世纪50年代,随着Olson和May等人的工作,主动噪声控制才真正开始被研究和应用。
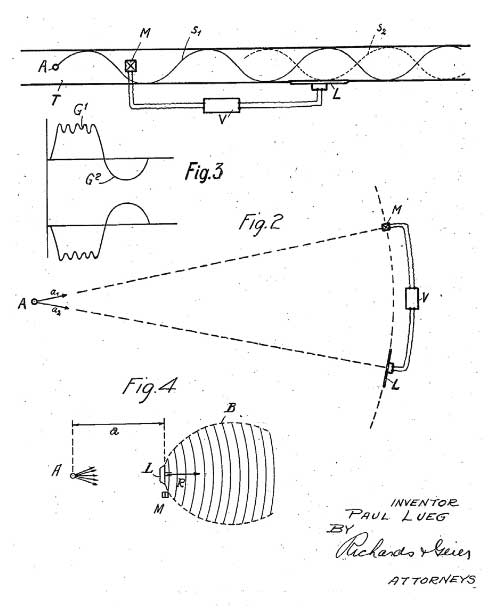
图4.早期主动噪声控制专利的示意图。M,麦克风;L,扬声器;V,电子控制器;A,声学初级源。顶部图展示了一个潜在的管道主动噪声控制实现。T,管道;S1,初级声波;S2,次级源波。图2展示了一个潜在的系统,用于在自由场环境中控制球形波。图3描述了非正弦信号相位相反的含义,由不规则的曲线G1和G2表示。图4展示了一种替代的自由场实现,其中次级源位于初级源的距离(a),B是主要发生在R方向上的噪声减少区域。
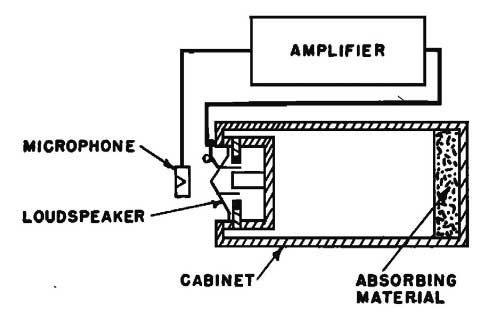
图5.Olson和May(1953年)提出的“电子声吸收器”,其中使用麦克风信号在经过放大器的修改后驱动扬声器。扬声器被密封在一个带有封闭吸音材料的机壳里。摘自Olson和May(1953年)的论文,并获得美国声学学会的许可。
早期的应用包括控制管道和机器设备的噪声辐射、噪声消除耳机等。然而,由于技术的不成熟和期望的过高,这些系统的性能经常受到限制,需要经常调整。
20世纪70年代,随着数字信号处理方法的出现,自动调整主动噪声控制系统中声波的幅度和相位成为可能。Kido(1975)和Chaplin等人(1978)报道了第一批数字主动噪声控制系统,后者提出了一种数字波形合成器来自适应控制许多机械噪声问题中典型的重复过程产生的噪声。这些早期工作催生了现代数字前馈主动控制系统设计。
此后,该技术逐渐被应用于汽车、飞机和直升机等交通工具的噪声控制中。
尽管早期主动噪声控制技术的应用受到限制,但近年来随着技术的成熟和成本的降低,其应用范围越来越广。目前,主动噪声控制不仅用于高端耳机,还开始进入消费者市场,如洗衣机和洗碗机等等。
此外,随着人工智能技术的快速发展,主动声音控制也在不断探索新的应用场景,如提供情境依赖行为或个性化体验等新功能。同时,在海洋工程和建筑环境中,主动声音控制有望发挥重要作用。
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。
