
在 WebRTC Android 中,已经兼容了 Camera 和 Camera2 原生 API 的相机采集,所以我们不必再单独实现一套采集功能。不过我们可以根据 RTC 的抽象 CameraCapturer 接口实现 CameraX (其实也是基于 Camera2的封装) 的相机采集,显然,这不是该篇的主题就不再多说了。该篇文章,主要为大家解析 WebRTC 的相机采集从 java 到 Jni 的一个调用过程。
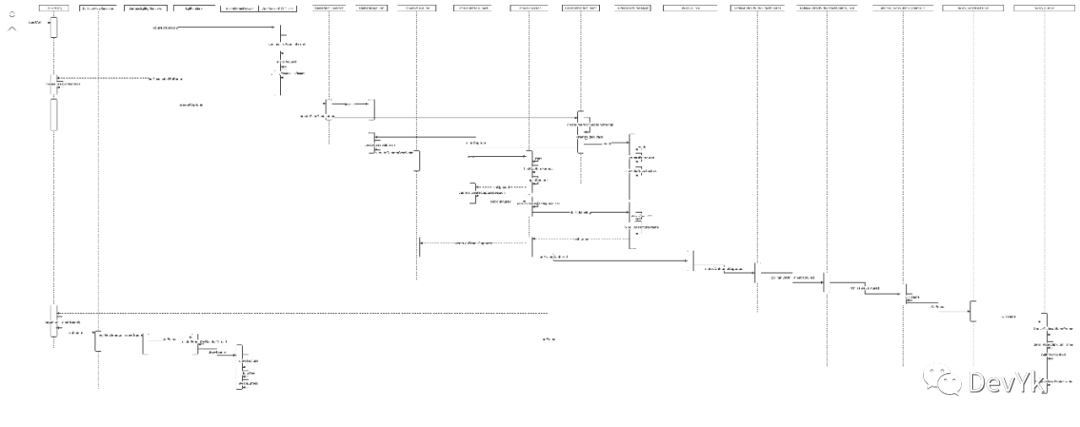
先上一个整个调用的时序图,有条件的同学可以根据时序图来跟踪源码:
其实整个涉及到的文件还是比较多的
原图链接: http://devyk.top/2022/WebRTC相机采集流程.png
相机采集
WebRTC Android 中定义了一个抽象的视频采集接口为 VideoCapturer , 内部定义了 初始化(SurfaceTexture 渲染帮助类 、相机采集 VideoFrame 回调 ) 、**开始/结束/释放 ** 等采集生命周期 API, 最终实现有 Camera1Capturer 和 Camera2Capturer 2 个子类。
为了有一个更清晰的一个结构,下面可以看一下 VideoCapturer 类图:
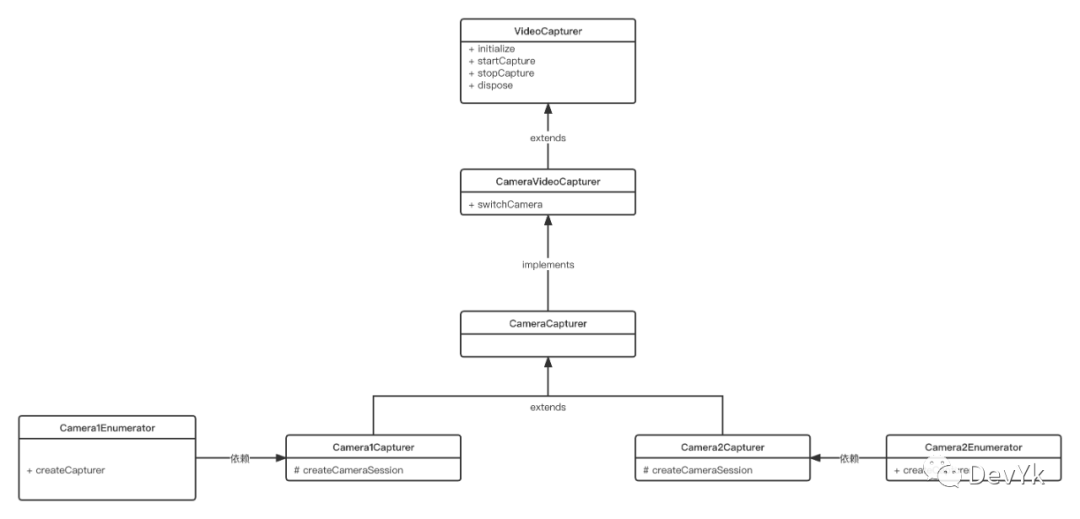
下面我们分别来介绍 webrtc 是如何来对 Camera1/2 进行创建并使用的,首先我们先看下上面的类图, 最顶层是 VideoCapturer 抽象接口
// Base interface for all VideoCapturers to implement.
public interface VideoCapturer {
void initialize(SurfaceTextureHelper surfaceTextureHelper, Context applicationContext,
CapturerObserver capturerObserver);
void startCapture(int width, int height, int framerate);
void stopCapture() throws InterruptedException;
void changeCaptureFormat(int width, int height, int framerate);
void dispose();
boolean isScreencast();
}它的直接实现为 CameraVideoCapturer 然后它具体的实现是一个抽象 CameraCapturer , 该抽象类封装了 Camera1/2 公共部分,当调用 startCapture 接口,内部实现了 createCameraSession 抽象函数,以供 Camera1/2 各自进行创建 Session,可以看下下面代码的调用:
abstract class CameraCapturer implements CameraVideoCapturer {
...
@Override
public void startCapture(int width, int height, int framerate) {
...
createSessionInternal(0);
}
private void createSessionInternal(int delayMs) {
cameraThreadHandler.postDelayed(new Runnable() {
@Override
public void run() {
createCameraSession(createSessionCallback, cameraSessionEventsHandler, applicationContext,
surfaceHelper, cameraName, width, height, framerate);
}
}, delayMs);
}
//Camera 1 and Camera1 实现
abstract protected void createCameraSession(CameraSession.CreateSessionCallback createSessionCallback, CameraSession.Events events,
Context applicationContext, SurfaceTextureHelper surfaceTextureHelper, String cameraName,
int width, int height, int framerate);
}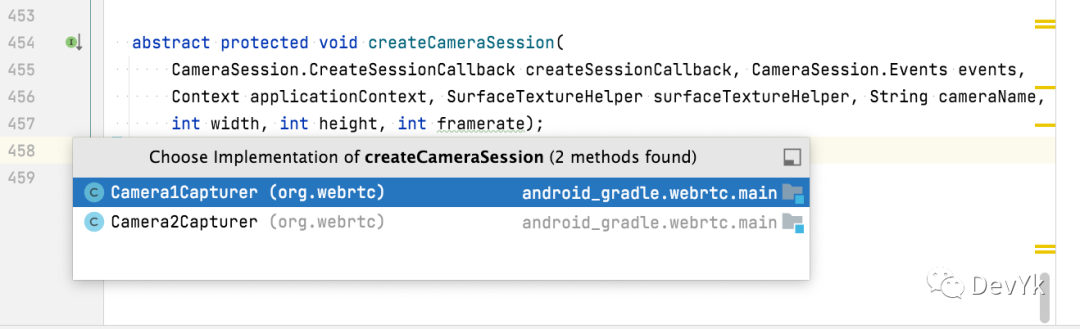
可以看到最终抽象的实现就是最上面类图中的 Camera1Capturer 和 Camera2Capturer ,我们还是分别进行分析。
Camera 1
如果最上层使用 Camera1 进行 startCapture, 最终将执行到如下代码:
public Camera1Capturer(
@Override
protected void createCameraSession(CameraSession.CreateSessionCallback createSessionCallback,
CameraSession.Events events, Context applicationContext,
SurfaceTextureHelper surfaceTextureHelper, String cameraName, int width, int height,
int framerate) {
Camera1Session.create(createSessionCallback, events, captureToTexture, applicationContext,surfaceTextureHelper, Camera1Enumerator.getCameraIndex(cameraName), width, height,framerate);
}
} 可以看到函数体中具体是 Camera1Session#create 的调用,我们跟进去看一下
class Camera1Session implements CameraSession {
...
public static void create(final CreateSessionCallback callback, final Events events,
final boolean captureToTexture, final Context applicationContext,
final SurfaceTextureHelper surfaceTextureHelper, final int cameraId, final int width,
final int height, final int framerate) {
final long constructionTimeNs = System.nanoTime();
...
final android.hardware.Camera camera;
camera = android.hardware.Camera.open(cameraId);
camera.setPreviewTexture(surfaceTextureHelper.getSurfaceTexture());
final android.hardware.Camera.CameraInfo info = new android.hardware.Camera.CameraInfo();
android.hardware.Camera.getCameraInfo(cameraId, info);
final CaptureFormat captureFormat;
final android.hardware.Camera.Parameters parameters = camera.getParameters();
captureFormat = findClosestCaptureFormat(parameters, width, height, framerate);
final Size pictureSize = findClosestPictureSize(parameters, width, height);
updateCameraParameters(camera, parameters, captureFormat, pictureSize, captureToTexture);
if (!captureToTexture) {
final int frameSize = captureFormat.frameSize();
for (int i = 0; i < NUMBER_OF_CAPTURE_BUFFERS; ++i) {
final ByteBuffer buffer = ByteBuffer.allocateDirect(frameSize);
camera.addCallbackBuffer(buffer.array());
}
}
// Calculate orientation manually and send it as CVO insted.
camera.setDisplayOrientation(0 /* degrees */);
//内部会设置采集的 NV21 or OES 回调
callback.onDone(new Camera1Session(events, captureToTexture, applicationContext,
surfaceTextureHelper, cameraId, camera, info, captureFormat, constructionTimeNs));
}
} 可以看到这一步就是通过 Camera.open 打开摄像头,并进行帧率、采集格式、预览等一些基础设置.
private Camera1Session(...) {
...
surfaceTextureHelper.setTextureSize(captureFormat.width, captureFormat.height);
startCapturing();
}当实例化 Camera1Session 时,会首先设置 surfaceTexture 的缓冲大小,也就是分辨率,最后是调用 this.startCapturing()
在 startCapturing 实现体中,调用了 camera 的预览函数,我们一起来看下
private void startCapturing() {
Logging.d(TAG, "Start capturing");
checkIsOnCameraThread();
state = SessionState.RUNNING;
...
if (captureToTexture) {
//采集输出 OES 纹理
listenForTextureFrames();
} else {
//采集输出 YUV420sp(NV21)buf
listenForBytebufferFrames();
}
try {
camera.startPreview();
} catch (RuntimeException e) {
stopInternal();
events.onCameraError(this, e.getMessage());
}
}这里我们统一只介绍采集 OES 纹理,在 listenForTextureFrames 函数中实现了采集的 frame 回调
private void listenForTextureFrames() {
surfaceTextureHelper.startListening((VideoFrame frame) -> {
checkIsOnCameraThread();
...
final VideoFrame modifiedFrame = new VideoFrame(
CameraSession.createTextureBufferWithModifiedTransformMatrix(
(TextureBufferImpl) frame.getBuffer(),
/* mirror= */ info.facing == android.hardware.Camera.CameraInfo.CAMERA_FACING_FRONT,
/* rotation= */ 0),
/* rotation= */ getFrameOrientation(), frame.getTimestampNs());
events.onFrameCaptured(Camera1Session.this, modifiedFrame);
modifiedFrame.release();
});
}当接收到采集后的数据,会调用 events.onFrameCaptured 函数,后面的处理就会在 native 中了,会单独进行分析。
Camera2
Camera2 API 是 Android API-22 加入的,目的是为了支持更加复杂的相机使用场景,因此它的 API 使用也相较于 Camera1 复杂一些。
如果最上层使用 Camera2 进行 startCapture, 那么它的代码调用如下:
@TargetApi(21)
public class Camera2Capturer extends CameraCapturer {
...
@Override
protected void createCameraSession(CameraSession.CreateSessionCallback createSessionCallback,
CameraSession.Events events, Context applicationContext,
SurfaceTextureHelper surfaceTextureHelper, String cameraName, int width, int height,
int framerate) {
Camera2Session.create(createSessionCallback, events, applicationContext, cameraManager,
surfaceTextureHelper, cameraName, width, height, framerate);
}
} 这里与 Camera1 调用类似,具体 Camera2 使用也是在 CameraSeesion 中,代码如下:
class Camera2Session implements CameraSession {
public static void create(CreateSessionCallback callback, Events events,
Context applicationContext, CameraManager cameraManager,
SurfaceTextureHelper surfaceTextureHelper, String cameraId, int width, int height,int framerate) {
new Camera2Session(callback, events, applicationContext, cameraManager, surfaceTextureHelper,cameraId, width, height, framerate);
}
private Camera2Session(...)
{
start();
}
private void start() {
checkIsOnCameraThread();
Logging.d(TAG, "start");
findCaptureFormat();
openCamera();
}
}上面 start 主要是找到相机的采集格式,比如找到采集的 fps 范围,采集的分辨率等,还有采集的颜色格式(统一是 NV21),最后是通过 openCamera 打开摄像头
@SuppressLint("MissingPermission")
private void openCamera() {
checkIsOnCameraThread();
Logging.d(TAG, "Opening camera " + cameraId);
events.onCameraOpening();
try {
cameraManager.openCamera(cameraId, new CameraStateCallback(), cameraThreadHandler);
} catch (CameraAccessException e) {
reportError("Failed to open camera: " + e);
return;
}
}通过 mCameraManager#openCamera 传入摄像头的 id 和 Camera 状态回调。调用之后,成功与失败就会执行到该接口中
public static abstract class StateCallback {
public abstract void onOpened(@NonNull CameraDevice camera);
public void onClosed(@NonNull CameraDevice camera);
public abstract void onDisconnected(@NonNull CameraDevice camera);
public abstract void onError(@NonNull CameraDevice camera,
@ErrorCode int error);
}当打开成功就会执行到 #onOpened 函数中,我们看下具体打开成功后的操作
@Override
public void onOpened(CameraDevice camera) {
checkIsOnCameraThread();
Logging.d(TAG, "Camera opened.");
cameraDevice = camera;
surfaceTextureHelper.setTextureSize(captureFormat.width, captureFormat.height);
surface = new Surface(surfaceTextureHelper.getSurfaceTexture());
try {
camera.createCaptureSession(
Arrays.asList(surface), new CaptureSessionCallback(), cameraThreadHandler);
} catch (CameraAccessException e) {
reportError("Failed to create capture session. " + e);
return;
}
}可以看到,在该函数中主要设置启动预览,用的是 SurfaceTexture 进行接收数据,当调用 camera.createCaptureSession 之后会将创建的状态回调给 CameraCaptureSession.StateCallback 的子类,也就是第二个参数 new CaptureSessionCallback(), 当创建成功之后,会执行 onConfigured 回调,最后会在该回调中进行设置帧率,和关联 surface 和设置采集的回调(OES)。有一点需要注意一下,采集的宽高不是直接设置给 CameraDevice 的,而是设置给 SurfaceTexture 的。
public void onConfigured(CameraCaptureSession session) {
....
surfaceTextureHelper.startListening((VideoFrame frame) -> {
...
//将采集到的相机 OES 纹理回调出去
events.onFrameCaptured(Camera2Session.this, modifiedFrame);
...
}
....
}这里之后,Camera1 和 Camera2 的处理流程是一样的了,下面会统一介绍。
到这里主要采集的工作已经完成了,我们总结下 Camera1和Camera2 的流程吧:
Camera1:
- 通过 Camera.open 实例化
- 通过 camera.setPreviewTexture 设置预览 SurfaceTexture , 主要是用来接收帧数据.
- 通过 camera.setParameters 设置相机预览的参数,比如帧率、分辨率等
- 通过 camera.setDisplayOrientation 设置预览的方向
- 通过 camera.startPreview/stopPreview/release 设置预览的生命周期
Camera2:
- 通过 getSystemService(Context.CAMERA_SERVICE) 创建相机管理类
- 通过 mCameraManager.openCamera 创建 CameraDevice ,并设置创建的状态回调
- 通过 CameraDevice.StateCallback#onOpened 接收创建成功的回调,通过 camera.createCaptureSession 开启预览的 session,并设置 create 的回调。
- 通过 CameraCaptureSession.StateCallback#onConfigured 来接收上一步设置的session 状态回调,最后是通过 session.setRepeatingRequest 来设置采集的数据格式
- 通过 cameraCaptureSession.stop 和 cameraDevice.close 来停止 Camera2 的预览
相机数据 native 处理
上一小节我们分析到了 events.onFrameCaptured(Camera2Session.this, modifiedFrame); 该回调会执行到
CameraCapturer#onFrameCaptured 函数中,最后调用 capturerObserver.onFrameCaptured(frame); 会执行到 VideoSource#onFrameCaptured 函数,如下代码所示:
//CameraCapturer.java
@Override
public void onFrameCaptured(CameraSession session, VideoFrame frame) {
checkIsOnCameraThread();
synchronized (stateLock) {
...
capturerObserver.onFrameCaptured(frame);
}
} //VideoSource.java
@Override
public void onFrameCaptured(VideoFrame frame) {
final VideoProcessor.FrameAdaptationParameters parameters =
nativeAndroidVideoTrackSource.adaptFrame(frame);
synchronized (videoProcessorLock) {
if (videoProcessor != null) {
videoProcessor.onFrameCaptured(frame, parameters);
return;
}
}
VideoFrame adaptedFrame = VideoProcessor.applyFrameAdaptationParameters(frame, parameters);
if (adaptedFrame != null) {
nativeAndroidVideoTrackSource.onFrameCaptured(adaptedFrame);
adaptedFrame.release();
}
}
//NativeAndroidVideoTrackSource.java
private static native void nativeOnFrameCaptured(
long nativeAndroidVideoTrackSource, int rotation, long timestampNs, VideoFrame.Buffer buffer);到这里,就会将采集到的数据 VideoFrame 包装类,传递到 NativeAndroidVideoTrackSource_jni.h 代码中, 接着会把 nativeAndroidVideoTrackSource 指针地址转为 Native 端的 AndroidVideoTrackSource class,再调用内部的 OnFrameCaptured 函数,详细代码如下:
JNI_GENERATOR_EXPORT void Java_org_webrtc_NativeAndroidVideoTrackSource_nativeOnFrameCaptured(
JNIEnv* env,
jclass jcaller,
jlong nativeAndroidVideoTrackSource,
jint rotation,
jlong timestampNs,
jobject buffer) {
AndroidVideoTrackSource* native =
reinterpret_cast<AndroidVideoTrackSource*>(nativeAndroidVideoTrackSource);
CHECK_NATIVE_PTR(env, jcaller, native, "OnFrameCaptured");
return native->OnFrameCaptured(env, rotation, timestampNs,
base::android::JavaParamRef<jobject>(env, buffer));
}当执行到内部的 OnFrameCaptured 函数,代码如下:
void AndroidVideoTrackSource::OnFrameCaptured(
JNIEnv* env,
jint j_rotation,
jlong j_timestamp_ns,
const JavaRef<jobject>& j_video_frame_buffer) {
rtc::scoped_refptr<VideoFrameBuffer> buffer =
AndroidVideoBuffer::Create(env, j_video_frame_buffer);
//转为 c++ 枚举
const VideoRotation rotation = jintToVideoRotation(j_rotation);
// AdaptedVideoTrackSource handles applying rotation for I420 frames.
//这里主要是处理 I420 数据的旋转
if (apply_rotation() && rotation != kVideoRotation_0)
buffer = buffer->ToI420();
//调用当前的 OnFrame 函数
OnFrame(VideoFrame::Builder()
.set_video_frame_buffer(buffer)
.set_rotation(rotation)
.set_timestamp_us(j_timestamp_ns / rtc::kNumNanosecsPerMicrosec)
.build());
}调用 OnFrame 后的代码
void AdaptedVideoTrackSource::OnFrame(const webrtc::VideoFrame& frame) {
rtc::scoped_refptr<webrtc::VideoFrameBuffer> buffer(
frame.video_frame_buffer());
if (apply_rotation() && frame.rotation() != webrtc::kVideoRotation_0 &&
buffer->type() == webrtc::VideoFrameBuffer::Type::kI420) {
/* Apply pending rotation. */
webrtc::VideoFrame rotated_frame(frame);
//内部调用 libyuv 进行处理旋转
rotated_frame.set_video_frame_buffer(
webrtc::I420Buffer::Rotate(*buffer->GetI420(), frame.rotation()));
rotated_frame.set_rotation(webrtc::kVideoRotation_0);
broadcaster_.OnFrame(rotated_frame);
} else {
broadcaster_.OnFrame(frame);
}
}因为我们这里是 OES 纹理,并且也不会处理旋转,所以直接走 else ,VideoBroadcaster#OnFrame 函数,在这里会遍历 std::vector,然后调用对应 sink 的 OnFrame 进行处理
void VideoBroadcaster::OnFrame(const webrtc::VideoFrame& frame) {
rtc::CritScope cs(&sinks_and_wants_lock_);
bool current_frame_was_discarded = false;
for (auto& sink_pair : sink_pairs()) {
...
if (sink_pair.wants.black_frames) {
webrtc::VideoFrame black_frame =
webrtc::VideoFrame::Builder()
.set_video_frame_buffer(
GetBlackFrameBuffer(frame.width(), frame.height()))
.set_rotation(frame.rotation())
.set_timestamp_us(frame.timestamp_us())
.set_id(frame.id())
.build();
sink_pair.sink->OnFrame(black_frame);
} else if (!previous_frame_sent_to_all_sinks_ && frame.has_update_rect()) {
webrtc::VideoFrame copy = frame;
copy.clear_update_rect();
sink_pair.sink->OnFrame(copy);
} else {
sink_pair.sink->OnFrame(frame);
}
}
}
通过 debug 我们可以知道,内部有 2 个 sink,一个是 VideoSinkWrapper 另一个是 VideoStreamEncoder
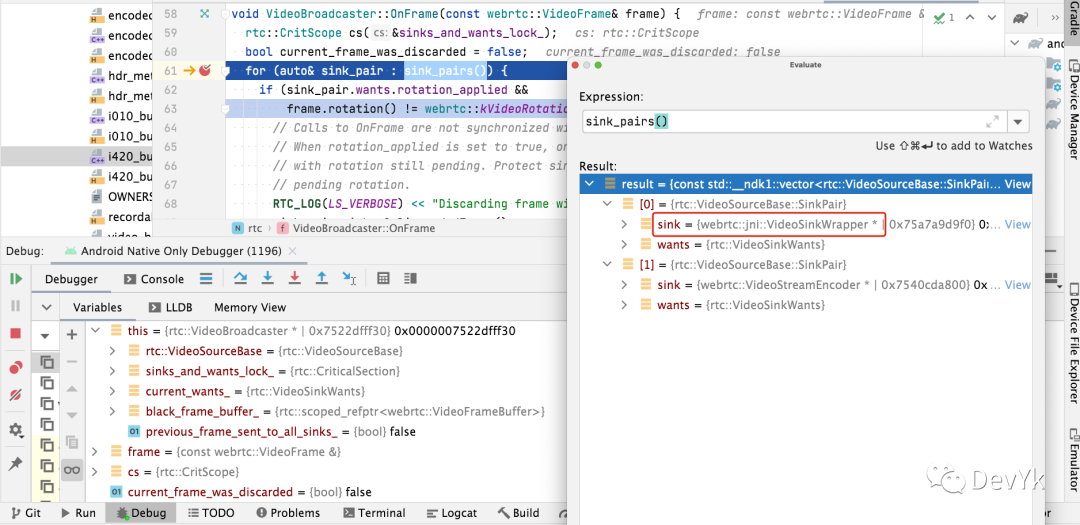
该篇不会涉及编码相关介绍,所以先忽略这个指针吧
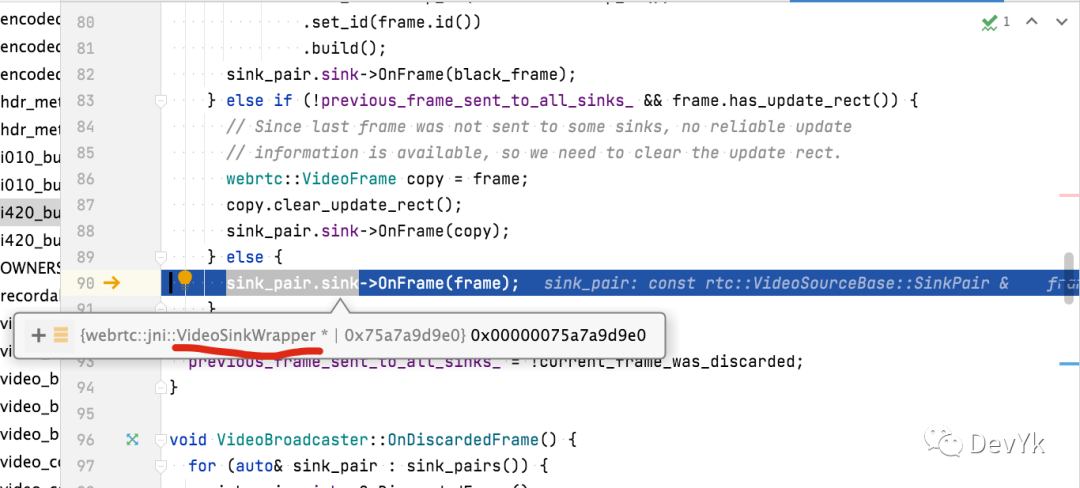
我们跟进 VideoSinkWrapper#OnFrame 去看看
#video_sink.cc
void VideoSinkWrapper::OnFrame(const VideoFrame& frame) {
JNIEnv* jni = AttachCurrentThreadIfNeeded();
//1. 主要将 Native 中的 VideoFrame 实例化为 Java 端的 VideoFrame
ScopedJavaLocalRef<jobject> j_frame = NativeToJavaVideoFrame(jni, frame);
//2.
Java_VideoSink_onFrame(jni, j_sink_, j_frame);
//3.
ReleaseJavaVideoFrame(jni, j_frame);
}我们直接看第二步吧,这一步其实就是把 VideoFrame 通过 JNIEnv#CallVoidMethod 回调给 Java 端,代码如下
static void Java_VideoSink_onFrame(JNIEnv* env, const base::android::JavaRef<jobject>& obj, const
base::android::JavaRef<jobject>& frame) {
//拿到 "org/webrtc/VideoSink" Java的 claszz
jclass clazz = org_webrtc_VideoSink_clazz(env);
CHECK_CLAZZ(env, obj.obj(),
org_webrtc_VideoSink_clazz(env));
jni_generator::JniJavaCallContextChecked call_context;
call_context.Init<
base::android::MethodID::TYPE_INSTANCE>(
env,
clazz,
"onFrame",
"(Lorg/webrtc/VideoFrame;)V",
&g_org_webrtc_VideoSink_onFrame);
env->CallVoidMethod(obj.obj(),
call_context.base.method_id, frame.obj());
}看到 CallVoidMethod 是不是感觉特亲切了,它的第一个参数就是回调给 java 具体的对象,第二个参数就是回调给对象中的具体函数,第三个是传参的具体数据类型。
void CallVoidMethod(jobject obj, jmethodID methodID, ...)第一个参数 obj 我们预览的时候再进行说明,第二个参数可以通过上面的代码得知,它是 onFrame 函数,参数签名为 “(Lorg/webrtc/VideoFrame;)V” ,后面传递的参数就是 VideoFrame。
到这里 jni 处理采集到的相机数据就处理完了,其实采集 java -> jni -> java 中间部分就通过 libyuv处理了下 I420 的旋转,如果不处理旋转的话,就直接再回调给 java 即可。
相机数据预览
上一小节我们留了一个问题,就是 env->CallVoidMethod(obj.obj(), call_context.base.method_id, frame.obj()); 的第一个参数这个 obj 具体是哪个类的,我们先来到 CallActivity.java 的 onConnectedToRoomInternal 函数这个函数的回调就是代表 WebSocket 连接成功并且进入到了视频通话房间中。我们具体看下该函数的实现:
//CallActivity.java
private final ProxyVideoSink remoteProxyRenderer = new ProxyVideoSink();
private final ProxyVideoSink localProxyVideoSink = new ProxyVideoSink();
private final List<VideoSink> remoteSinks = new ArrayList<>();
remoteSinks.add(remoteProxyRenderer);
private static class ProxyVideoSink implements VideoSink {
private VideoSink target;
@Override
synchronized public void onFrame(VideoFrame frame) {
if (target == null) {
Logging.d(TAG, "Dropping frame in proxy because target is null.");
return;
}
//本地纹理
target.onFrame(frame);
}
synchronized public void setTarget(VideoSink target) {
this.target = target;
}
}
private void onConnectedToRoomInternal(final SignalingParameters params) {
final long delta = System.currentTimeMillis() - callStartedTimeMs;
signalingParameters = params;
logAndToast("Creating peer connection, delay=" + delta + "ms");
VideoCapturer videoCapturer = null;
if (peerConnectionParameters.videoCallEnabled) {
//第一步
videoCapturer = createVideoCapturer();
}
//第二步
peerConnectionClient.createPeerConnection(
localProxyVideoSink, remoteSinks, videoCapturer, signalingParameters);
...
}
P2P 建联媒体协商,这里就不再说明了,因为不是该篇的内容。我们先看第一步,可以发现 createVideoCapturer 返回值就是 VideoCapturer 相机采集的基类,跟第一小节的 VideoCapturer 给对应上了,接着往下看,这里会调用 PeerConnectionClient#createPeerConnection 函数,会把本地的 VideoSink和远端的 VideoSink 给传递过去,具体代码如下:
//PeerConnectionClient.java
public void createPeerConnection(final VideoSink localRender, final List<VideoSink> remoteSinks,
final VideoCapturer videoCapturer, final SignalingParameters signalingParameters) {
...
this.localRender = localRender;
this.remoteSinks = remoteSinks;
this.videoCapturer = videoCapturer;
executor.execute(() -> {
try {
...
createPeerConnectionInternal();
...
} catch (Exception e) {
reportError("Failed to create peer connection: " + e.getMessage());
throw e;
}
});
...
}我们只分析关键位置,继续执行到 createPeerConnectionInternal 函数内部中
//PeerConnectionClient.java
private void createPeerConnectionInternal() {
...
if (isVideoCallEnabled()) {
peerConnection.addTrack(createVideoTrack(videoCapturer), mediaStreamLabels);
...
}
...
}已经快接近真像了,再坚持一下. 我们先看一下 createVideoTrack 具体实现,代码如下:
//PeerConnectionClient.java
@Nullable
private VideoTrack createVideoTrack(VideoCapturer capturer) {
//第一步
surfaceTextureHelper =
SurfaceTextureHelper.create("CaptureThread", rootEglBase.getEglBaseContext());
videoSource = factory.createVideoSource(capturer.isScreencast());
//第二步
capturer.initialize(surfaceTextureHelper, appContext, videoSource.getCapturerObserver());
capturer.startCapture(videoWidth, videoHeight, videoFps);
localVideoTrack = factory.createVideoTrack(VIDEO_TRACK_ID, videoSource);
localVideoTrack.setEnabled(renderVideo);
//第三步
localVideoTrack.addSink(localRender);
return localVideoTrack;
}这个函数代码比较核心,我们分为 3 个步骤进行分析
先来看第一步,首先是通过 SurfaceTextureHelper.create 创建一个 SurfaceTextureHelper 。在第一小节我们已经发现它的影子了,当时没有介绍它。就是等这一刻来介绍。
当调用 create 的时候,内部会进行实例化该对象,最终会执行到构造函数,我们看下具体实现,代码如下:
private SurfaceTextureHelper(Context sharedContext, Handler handler, boolean alignTimestamps,
YuvConverter yuvConverter, FrameRefMonitor frameRefMonitor) {
//判断线程
if (handler.getLooper().getThread() != Thread.currentThread()) {
...
}
...
//在 CaptureThread 线程中创建 EGL 环境
eglBase = EglBase.create(sharedContext, EglBase.CONFIG_PIXEL_BUFFER);
try {
eglBase.createDummyPbufferSurface();
eglBase.makeCurrent();
} catch (RuntimeException e) {
eglBase.release();
handler.getLooper().quit();
throw e;
}
//OES 纹理id 生成的核心代码
oesTextureId = GlUtil.generateTexture(GLES11Ext.GL_TEXTURE_EXTERNAL_OES);
//创建 SurfaceTexture 对象,传入纹理 id
surfaceTexture = new SurfaceTexture(oesTextureId);
//设置渲染的回调,调用 updateTexImage 执行
setOnFrameAvailableListener(surfaceTexture, (SurfaceTexture st) -> {
hasPendingTexture = true;
//相机机数据可用时就会进行回调,然后就将采集到数据回调给 设置 SurfaceTextureHelper#startListening 处
tryDeliverTextureFrame();
}, handler);
}
@TargetApi(21)
private static void setOnFrameAvailableListener(SurfaceTexture surfaceTexture,
SurfaceTexture.OnFrameAvailableListener listener, Handler handler) {
if (Build.VERSION.SDK_INT >= Build.VERSION_CODES.LOLLIPOP) {
surfaceTexture.setOnFrameAvailableListener(listener, handler);
} else {
surfaceTexture.setOnFrameAvailableListener(listener);
}
}总结一下上面的代码作用,首先是创建 EGL 环境,然后通过 GL ES 创建一个 OES ID 纹理,将这个纹理传递给创建好的 SurfaceTexture 对象,最后是设置采集到的帧回调,如果有数据就会回调给如下代码:
surfaceTextureHelper.startListening((VideoFrame frame) -> {
...
events.onFrameCaptured(Camera1Session.this, modifiedFrame);
...
}该处代码也与上一小节给对应上了。
我们继续看 createVideoTrack 代码的第二部分:
首先调用 VideoCapturer#initialize 初始化函数,其次是调用 VideoCapturer#startCapture 开始采集的函数,该处也与上一小节给对应上了。
我们来看 createVideoTrack 代码的第三部分:
我们传入了 本地预览的 VideoSink
localVideoTrack.addSink(localRender);继续跟一下 addSink,
//VideoTrack.java
public void addSink(VideoSink sink) {
...
if (!sinks.containsKey(sink)) {
//1.
final long nativeSink = nativeWrapSink(sink);
sinks.put(sink, nativeSink);
//2.
nativeAddSink(getNativeMediaStreamTrack(), nativeSink);
}
}第一步是一个 native 函数,它的实现在 VideoTrack_jni.h 处,我们跟一下代码
JNI_GENERATOR_EXPORT jlong Java_org_webrtc_VideoTrack_nativeWrapSink(
JNIEnv* env,
jclass jcaller,
jobject sink) {
return JNI_VideoTrack_WrapSink(env, base::android::JavaParamRef<jobject>(env, sink));
}继续跟
//video_track.cc
static jlong JNI_VideoTrack_WrapSink(JNIEnv* jni,
const JavaParamRef<jobject>& sink) {
return jlongFromPointer(new VideoSinkWrapper(jni, sink));
}咦,我们发现上一小节的相机数据 native 处理好像也用到了 VideoSinkWrapper 类,我们继续看一下这个实例化对象做了什么

通过上图标注 1 处,我们发现实例化该对象只是赋值了从 java 端传递过来的 ProxyVideoSink 。该 sink 就是接收采集到渲染的数据。
第二处就是执行在 ProxyVideoSink 中的 onFrame 函数,将 VideoFrame 给回调给 java 。所以这整个采集流程到渲染起始处都已经结合起来了,后面具体的渲染就是 SurfaceViewRenderer 了,通过 OpenGL ES 来渲染。就不详细来分析了。
实战 Demo
我把相机采集的代码从 WebRTC 中抽出来了,感兴趣的可以 clone 下来看看。
地址: https://github.com/yangkun19921001/WebRTCSample
总结
该篇文章详细的分析了 Camera1/2 的整个采集流程,有条件的建议 debug webrtc 源码来看。如果大家不会在 MACOS 下 debug webrtc 我后续可以出一篇如何在 MACOS 下搭建 webrtc 调试环境。
参考
- 《WebRTC Native 开发实战》
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。
