
在3D空间中确定确切位置(如机器人或无人机)是一件很难做到的事情。标准的GPS精度非常低,这就是为什么你的导航系统有时会认为你正在附近的道路上行驶,而不是实际行驶的道路。
GPS-RTK(Global Positioning System-Real Time Kinematics)可以极大地改善这一点,但由于需要额外的遥测数据来校正GPS信号,其价格较为昂贵。为了使无人机定位更实惠,James Bruton开发了一种基于超声波传感器的系统。
Bruton开始这个实验是为了协调无人机的运动(就像无人机表演)。即使是最简单的表演也需要许多独立无人机的协调,每个无人机都需要知道自己的确切位置。为它们配备GPS-RTK非常昂贵,这使得任何没有大量资金的组织都无法获得无人机表演。Bruton认为他可以用超声波传感器创造一种便宜的替代品。

一个典型的超声波传感器,就像可以在任何在线零售商那里找到的那种,通过脉冲超声波换能器并监听回声来工作。脉冲与回波之间的时间乘以传播速率,等于从超声波传感器、反射面到回波的总距离。但只有当超声波反射到坚硬的表面时种方法才有效,这意味着标准的超声波传感器不能在户外空间工作。
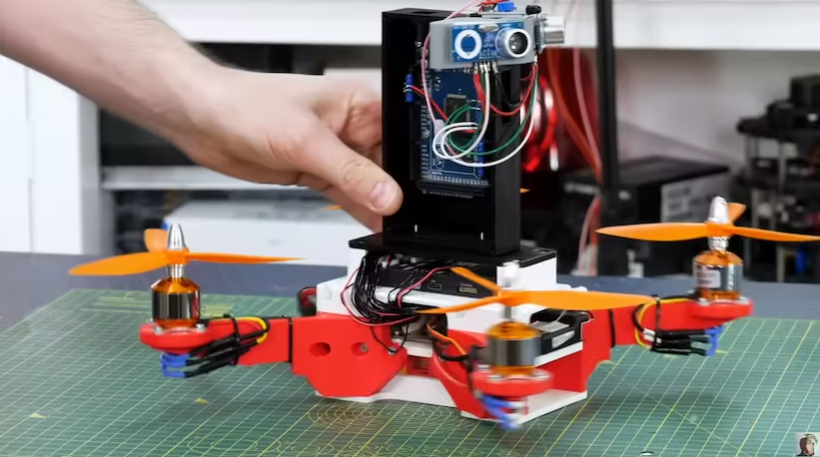
Bruton的解决方案是使用一对超声波传感器,一个安装在固定位置,对传感器进行脉冲,第二个连接到无人机上,监听超声波脉冲。
脉冲和接收信号之间的时间,乘以信号的传播速率,就是两个传感器之间的距离。通过两对传感器,无人机可以在二维平面上对其位置进行三角测量。如果Bruton加上第三个传感器,无人机就能在3D空间中定位。
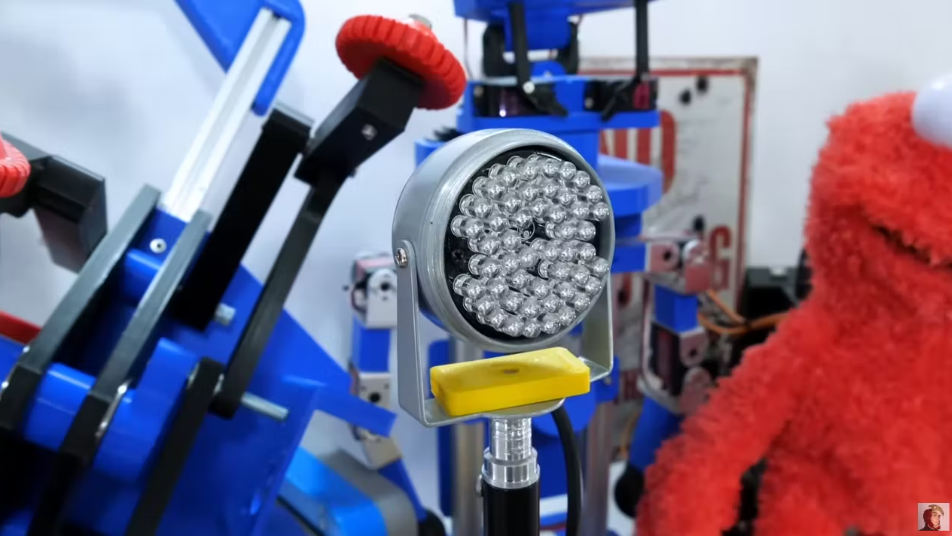
然而,这只有在发射和接收超声波传感器同步的情况下才能工作。否则,接收机不知道传输脉冲的时间,也无法计算距离。为了同步超声波传感器,Bruton使用了红外LED阵列和红外传感器。红外LED以相对较快的速度闪烁,当它们第一次打开(上升边缘)时,这向无人机发出信号,其中一个超声波传感器刚刚发出脉冲。当它们关闭(下降边缘)时,这向无人机发出信号,另一个超声波传感器发出脉冲。第三个超声波传感器(用于3D定位)将需要一些其他同步信号。
这个方法达到了一个较好的效果,它相当准确、快速并且有一个不错的范围,也可以通过负担得起的硬件来实现:一个用于无人机的Arduino Mega 2560,另一个用于每个发射器。不幸的是,来自无人机电机的干扰被证明太高,无法获得可靠的读数。Bruton将尝试另一种无人机定位方法,但这种超声波定位系统对于传统的机器人和其他情况仍然有用。
信息源于:hackster.io
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。
