
摘要:5G蜂窝网络在为终端提供无线通信功能的同时,也可以提供定位功能。基于5G MR指纹的室内定位技术,可以在不需(或不能)额外布设信源设备情况下,满足室内定位的基本要求。首先概述信令软采网络的拓扑架构,通过信令镜像数据接口,提升MR数据采集解析的时效性;接着详细介绍了基于5G MR指纹的室内定位技术的具体算法,包括指纹库生成算法、渐进式指纹信息匹配算法,既能有效提升定位精度,也可节省计算时间和资源消耗。
01 概 述
位置信息服务(LBS)与人们日常生活的联系日益紧密。可靠的LBS基于精准的位置信息,而精准的位置信息由高精度定位技术获取。与室外定位场景不同,室内环境、密集城区由于遮挡了GNSS卫星信号,无法满足室内业务位置服务的需求。目前蓝牙、UWB、Wi-Fi等定位技术作为卫星定位的补充,可以解决室内定位某一方面的问题,但各有不足,无法无缝解决GPS无法到达区域的人或物的位置定位问题。不同的定位技术优缺点如下:
a)蓝牙室内定位。其最大的优点是设备体积小、距离短、功耗低,容易被集成在手机等移动设备中。只要设备的蓝牙功能开启,就能够对其进行定位。蓝牙传输不受视距的影响,但对于复杂的空间环境,蓝牙系统的稳定性稍差,受噪声信号干扰大。
b)Wi-Fi定位。Wi-Fi定位技术有2种,一种是通过移动设备和3个无线网络接入点的无线信号强度,通过差分算法,来比较精准地进行三角定位。另一种是事先记录巨量的确定位置点的信号强度,构成指纹库;通过新加入设备的信号强度与指纹库比较,来确定位置。Wi-Fi定位的缺点是Wi-Fi基站或AP的质量不稳定,导致定位的质量无法有效保证。
c)UWB超宽带室内定位。这是一种使用纳秒甚至皮秒级别非正弦波窄脉冲进行通信的无载波通信技术。利用事先布置好的已知位置的锚节点和桥节点,与新加入的盲节点进行通信,并利用三角定位或者“指纹”定位方式来确定位置。具有穿透力强、抗多径效果好、安全性高、能提供精确定位等优点,前景相当广阔。但由于新加入的盲节点也需要主动通信使得功耗较高,而且事先也需要布局,使得成本较高。
以上这些室内定位技术,都需要在室内额外大规模密集部署UWB、Wi-Fi、蓝牙等信源设备,对于某些室内场景(比如大型展馆),出于安全管控或成本考虑,无法在现场部署这些设备。需要另辟蹊径,找一条室内定位的新路径。5G蜂窝网络将覆盖区域分割为一个个小区,在为终端提供无线通信功能的同时,也可以对小区内的设备进行定位,但这种小区级的定位,相对来说,定位精度不算高。表1列出Wi-Fi、蓝牙、UWB、5G等不同定位技术的对比情况。本文研究的基于5G MR指纹的室内定位方法,旨在解决如下问题。
a)不需额外布设信源设备,利用5G蜂窝网络满足室内米级定位精度需求。
b)MR数据的快速采集解析处理,满足定位及时性需求。
c)5G MR离线位置指纹库构建算法,解决指纹信息稳定性问题。
d)5G在线指纹定位匹配算法,满足定位稳定性和精度提升需求。
表1 Wi-Fi、蓝牙、UWB、5G等不同定位技术的对比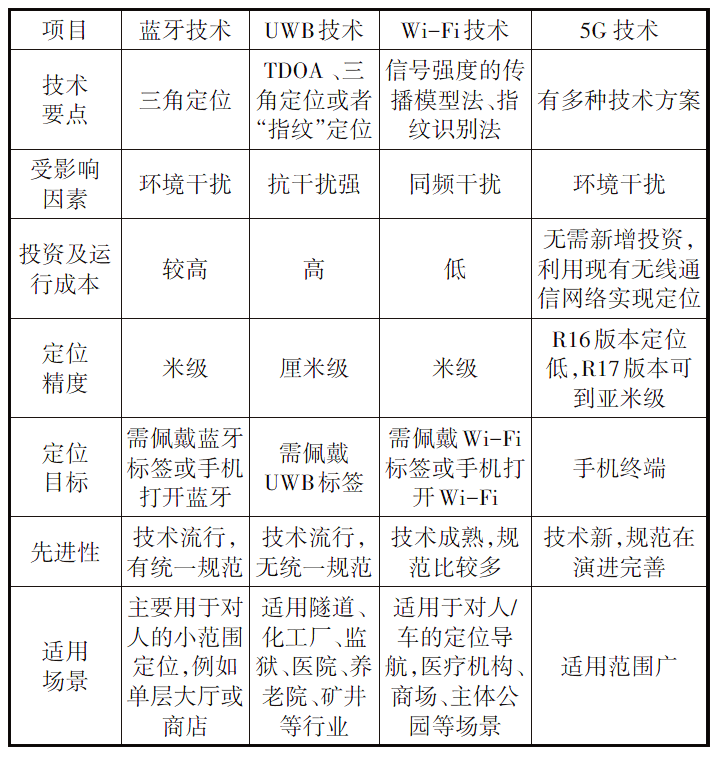

02 信令软采网络拓扑架构
基于5G MR指纹的室内定位技术,首先需要解决的是MR测量报告的采集和解析,信令软采网络拓扑架构如图1所示。
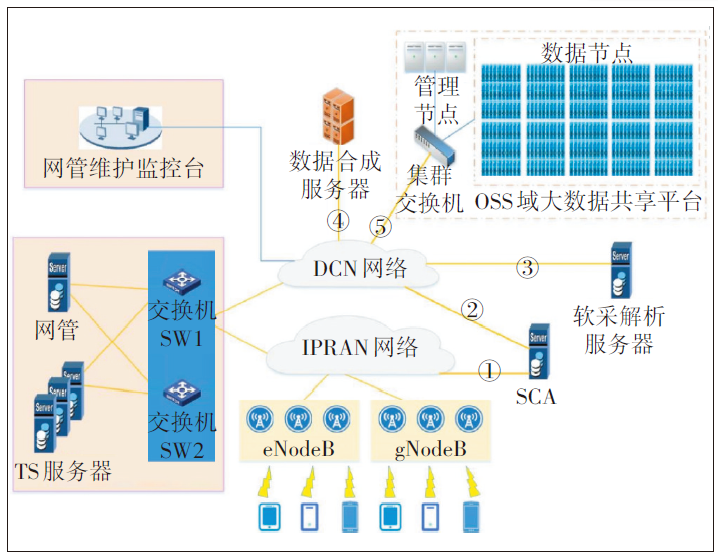
图1 信令软采网络拓扑架构
图1中,终端向基站实时上报MR测量报告数据,基站设备增加开放信令镜像数据接口,当软采功能打开时,各基站把发往OMC的数据流从镜像端口实时输出(厂家支持10 240、5 120 ms等短周期配置),由SCA流量汇聚适配器(Signaling Convergence Adapter)对数据进行汇聚并将已经添加了包头字段(用户身份标识、时间标识等)送往软采解析服务器。基站设备增加开放信令镜像数据接口,对基站负荷不会产生太大影响。软采解析服务器解析后,生成UE_MR XDR上报给数据合成服务器。数据合成服务器将同一UE的多个单接口XDR进行关联回填,处理结果存储于大数据共享平台。大数据共享平台部署定位算法引擎,对应用服务层提供统一的对外定位查询接口,提供网络定位服务的原子能力。业务应用获取到定位信息,结合地图、大数据分析实现人流统计、轨迹追踪等功能。
03 基于5G MR指纹的室内定位技术
3.1 5G MR测量报告数据内容
根据触发方式,MR测量报告数据分为周期性测量报告数据(Measurement Report of Original Type,MRO)和事件性测量报告数据(Measurement Report of Event Type,MRE)。本方法数据来源于软采解析处理后的UE_MR测量数据(此处周期是短周期,厂家支持10 240 ms、5 120 ms等),数据内容如表2所示。
表2 MR测量报告数据内容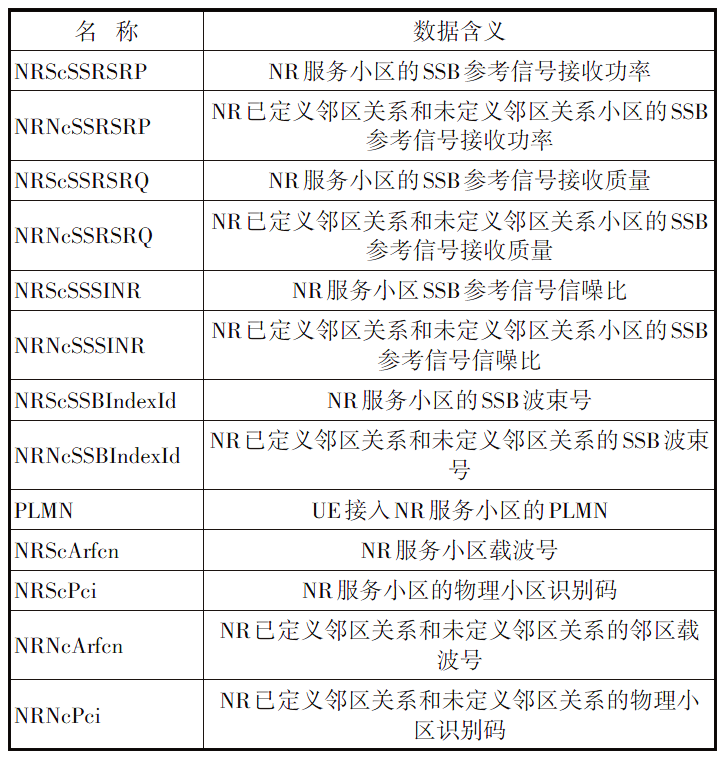
3.2 5G MR指纹室内定位系统流程
5G指纹室内定位流程主要分为5个环节,场景模型搭建、无线信息采集、指纹库的搭建、指纹信息匹配、位置标签输出(见图2)。
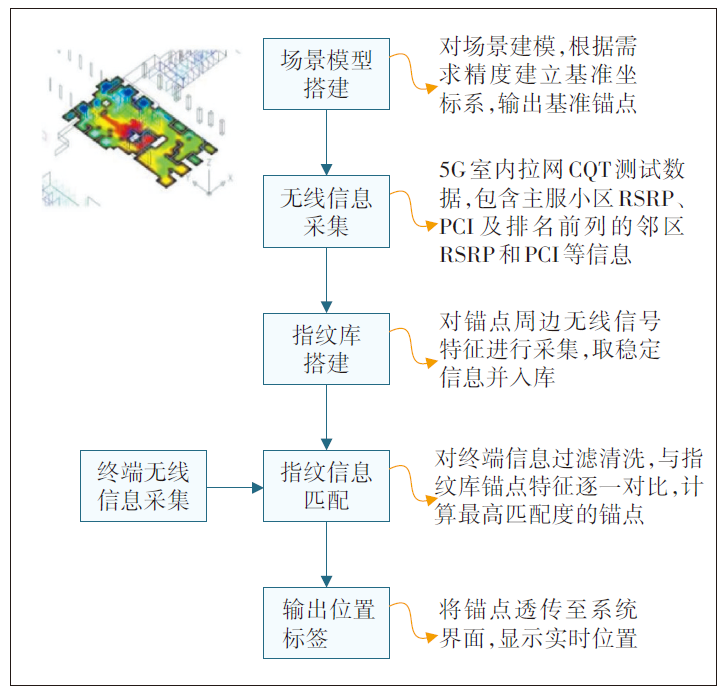
图2 室内定位系统流程
3.3 5G MR指纹定位算法
5G MR指纹定位算法的基本思路是:离线阶段,通过对室内5G CQT定点测试MR数据的解析,将室内环境简化成易于量化计算且能区分的信息量;汇总所有定点测试数据,构成5G MR室内位置指纹库。在线阶段,对终端实时上报的5G MR数据解析,利用定位算法,进行指纹信息匹配,从而实现室内位置的精准定位。该方案无需新增部署信源设备,同时利用现有5G MR数据和定位算法,即可满足室内定位需求。
3.3.1 离线阶段
3.3.1.1 场景模型搭建
以单层场馆为例,根据定位需求的精度,将室内区域划分为网格状结构,网格的边长设置为需求精度(比如设置为1 m),建立基准坐标系,每一个交点为一个参照点LPij。见图3:
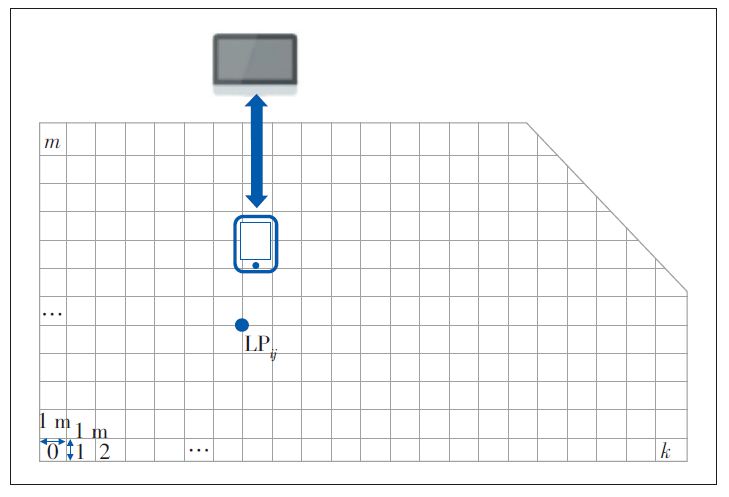
图3 基准坐标系示意图
3.3.1.2 无线信息采集
在每个参考点LPij上,解析CQT数据,采集该点的5G MR信号信息,包含服务小区的PCI、RSRP、RSRQ、SINR信息,以及排名第1邻区的PCI、RSRP、RSRQ、SINR信息,LPij第t次采样信息记为:
LPtij=[ScPCIt,ScRSRPt,ScRSRQt,ScSINRt,NcPCIt,NcRSRPt,NcRSRQt,NcSINRt]
即每个参考点LPij的单次采样数据,可用一个八元组LPtij表示,这是本文的训练集数据。
为确保参照点无线信息的准确性,对每个点采集TSampling次(比如TSampling=20)。
3.3.1.3 5G MR指纹库生成算法
通过众数、中位数的筛选,可有效过滤掉离群异常信号数据,提升指纹信息的稳定性需求。指纹库生成算法如下。
步骤1:对训练集数据进行值域范围过滤、空值删除等预处理。在此值域外的训练数据做剔除过滤。
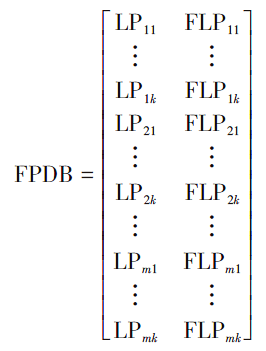
步骤2:对每个参考点LPij的T次采样数据LPtij,进行统计计算,求出该参考点的信息指纹FLPij。
FLPij=[(Mode1T(ScPCIt),Median1T(ScRSRPt),Median1T(ScRSRQt),Median1T(ScSINRt),Mode1T(NcPCIt),Median1T(NcRSRPt),Median1T(NcRSRQt),Median1T(NcSINRt)]
其中Mode函数是求众数函数,Median函数是求中位数函数,比如Mode1T(ScPCIt)表示对参考点LPij的所有采样数据LPijt (1≤t≤T),求其中ScPCI(服务小区PCI)的众数。
Median1T(ScRSRPt)表示对参考点LPij的所有采样数据LPijt(1≤t≤T),求其中ScRSRP(服务小区RSRP)的中位数。
以此类推,由所有参考点LPij的信息指纹FLPij (1≤i≤k,1≤j≤m),构成该场景的指纹库FPDB。
3.3.2 在线阶段
3.3.2.1 终端无线信息采集
假定某UE某时刻所处位置为LPUE,通过镜像信令软采,可近实时获取该用户上报的MR数据,并加以解析处理,得到该用户的定位指纹FLPUE:
FLPUE=[ScPCI,ScRSRP,ScRSRQ,ScSINR,NcPCI,NcRSRP,NcRSRQ,NcSINR]
3.3.2.2 5G MR指纹信息渐进式匹配算法
指纹匹配算法流程如图4所示。指纹信息匹配算法,通过3个步骤,即小区级粗定位、kNN相似度匹配以及三选一的定位估计,可有效提升定位精度,且可节省计算时间和资源消耗。算法描述如下。
步骤1:粗定位(小区定位)。根据UE某时指纹FLPUE中的服务小区PCI(ScPCI)和第1邻区的PCI(NcPCI),与场景指纹库中的服务小区PCI(ScPCI)和第1邻区的PCI(NcPCI),匹配关联,对UE所处位置进行粗定位,输出一个局部范围的参考点指纹子集{LPij,FLPij}。
步骤2:kNN相似度匹配。根据UE某时指纹FLPUE中的服务小区RSRP(ScRSRP),以及第1邻区的RSRP(NcRSRP),与Step1输出的局部范围的参考点指纹子集{LPij,FLPij}中相应字段,进行相似度计算。相似度的匹配使用欧氏距离描述,欧氏距离越小,表示相似度越高。
平方欧氏距离计算公式如下:
Dist(FLPij,FLPUE)=(ScRSRPij-ScRSRPUE )2+(NcRSRPij-NcRSRPUE)2
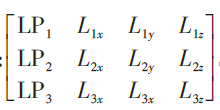
对欧氏距离Dist(FLPij,FLPUE)排序,选取欧氏距离最小的前k个参考点(比如k=3),输出排序最前面的3个参考点位置坐标:
 。
。
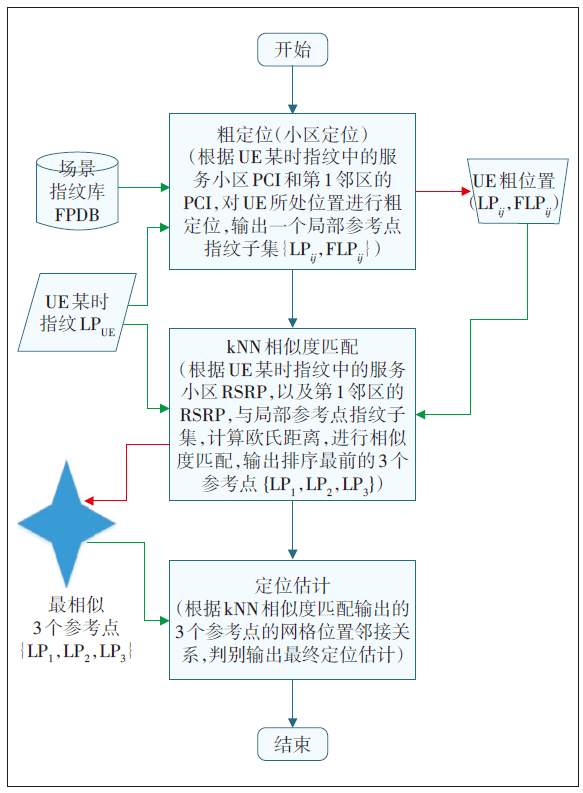
图4 指纹匹配算法流程
步骤3:定位估计
a)根据步骤2输出的3个参考点的网格位置邻接关系,三选一,输出最终定位估计。
表3 网络位置分布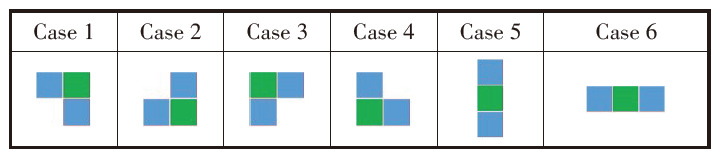
b)如果Step2输出的3个参考点的网格位置不属于表3中6种的任何一种,则选择欧氏距离最小的参考点LP1,为最终定位估计。
3.3.2.3 输出位置标签
基于大数据共享平台部署定位算法引擎,对应用服务层提供统一的对外定位查询接口,提供网络定位服务的原子能力。通过{用户ID、起始时间、终止时间}三变量组合,可展示单用户的运动轨迹。一般来说,用户当前时刻的状态与上一时刻的状态关联极强。比如用户静止时,前后位置保持不变;用户运动时,运动轨迹是平滑的。通过这些先验知识规则滤波,可以得到更准确的定位轨迹。此外,也可展示一段时间里该室内场景的人流分布情况。
04 应用案例
本文提出的定位方法在某大型场馆中进行了部署试验,定位精度可达到3 m以内,获得了较好效果和客户的肯定。图5所示为使用5G MR指纹库进行位置匹配的定位误差CDF曲线。
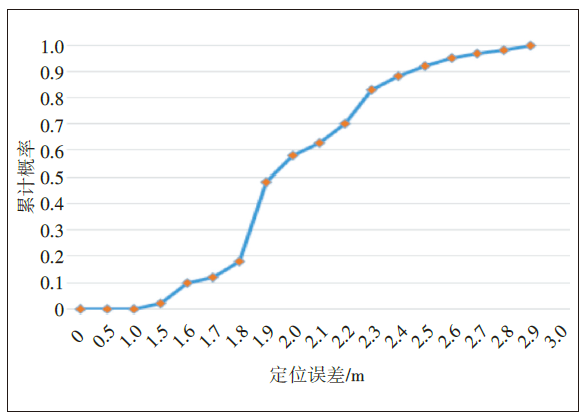
图5 5G MR指纹室内定位误差CDF曲线
05 结束语
高精度定位作为未来一体化网络的重要组成部分,成为大家关注和研究的热点。本文针对室内定位信号容易受到非视距和多径效应的影响,提出一种基于5G MR指纹的室内定位方法,对由室内多径效应引起的敏感输入数据具有鲁棒性,定位精度得到提升。由于不需(或不能)额外布设设备,利用越来普及的5G通信网络实现室内定位,非常具有实用价值。与小区定位法相比,提升了定位精度;相较于Wi-Fi室内定位法,提升了定位的稳定性;相较于UWB超宽带室内定位法,节省了资金成本。需要改进的地方是提升定位技术的稳定性,一方面由于室内环境的格局,物品的摆放,装饰装修发生变化,离线指纹库构建需要适应性更新;另一方面指纹匹配算法需要对室内环境的变化能够有一定的自我调节或适应能力。
作者简介
沈洪波,毕业于上海交通大学,中国联通上海市分公司党委书记、总经理,高级工程师,硕士,主要从事网络能力开放、移动互联网、云计算等工作;
姚赛彬,毕业于北京邮电大学,中国联通上海市分公司无线网运营中心总经理,高级工程师,硕士,主要从事无线网优化、通信网络规划、智能网络等工作;
汪保友,毕业于复旦大学,教授级高级工程师,博士,主要从事商业智能与大数据分析、无线网优化、网络与数据安全等工作。
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。