
一、什么是 Canny 边缘检测
Canny 边缘检测器是一种多步算法,用于检测任何输入图像的边缘。它涉及在检测图像边缘时要遵循的以下步骤。
1. 使用高斯滤波器去除输入图像中的噪声。
2.计算高斯滤波器的导数,计算图像像素的梯度,得到沿x和y维度的幅度。
3. 考虑垂直于给定边缘方向的任何曲线的一组邻居,抑制非最大边缘贡献像素点。
4. 最后,使用滞后阈值方法保留高于梯度幅值的像素,忽略低于低阈值的像素。
在深入研究以下步骤之前,是推导出该算法的 JK Canny 得出的三个结论:
-良好的检测:最佳检测器必须消除出现误报和漏报的可能性。
-良好的定位:检测到的边缘必须尽可能接近真实边缘。
-单响应约束:检测器必须只为每个边缘点返回一个点。
二、在Canny算法过程中需要遵循的步骤
降噪或图像平滑:
在存在噪声期间,像素可能与其相邻像素不接近。这可能导致获得不适当或不适当的边缘检测。为了避免同样的情况,我们使用高斯滤波器,它与图像卷积并去除噪声,防止输出图像中出现所需的边缘。
在下面的示例中,我们将高斯滤波器或核 g(x,y) 与图像 I 进行卷积。在这里,我们希望确保任何给定的像素必须与输出中的相邻像素相似,因此我们使用矩阵 [1 1 1] 保持像素之间的相似性并去除噪声。

g(x,y)= 高斯分布
I = 输入图像
衍生品:
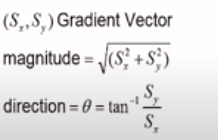
计算滤波器对 X 和 Y 维度的导数,并将其与 I 卷积以给出沿维度的梯度幅度。此外,可以使用两个维度之间的角度的正切来计算图像的方向。
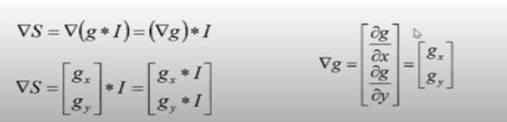
上述卷积产生具有大小和方向的梯度向量。
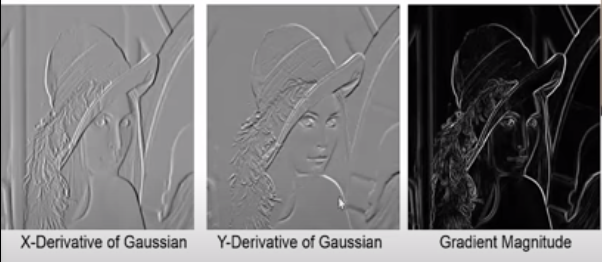
下面是一个高斯导数的例子,它最终有助于输出图像中的边缘。
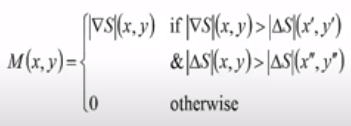
三、非最大抑制
沿着边缘,通常观察到很少有点使边缘的可见性更清晰。所以我们可以忽略那些对特征可见性贡献不大的边缘点。为了达到同样的目的,我们使用非最大抑制方法。这里我们标记边缘曲线上幅度最大的点。这可以通过寻找最大值以及与曲线垂直的切片来获得。
考虑下图中的边缘,它具有三个边缘点。假设点 (x,y) 为具有最大边缘梯度的点。检查垂直于边缘方向的边缘点,并验证它们的梯度是否小于 (x,y)。如果这些值小于 (x,y) 梯度,那么我们可以抑制曲线上的那些非最大值点。

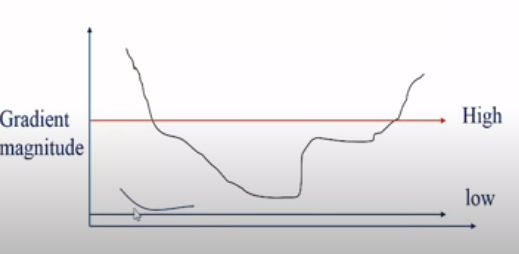
四、滞后阈值
五、总结
如果一个像素的梯度是:- 在“高”上方将其声明为“边缘像素”。- 下面,“低”将其声明为“非边缘像素”。- 在“低”和“高”之间。
迭代地考虑它的邻居,如果它连接到“边缘像素”或通过“低”和“高”之间的像素连接,则将其声明为“边缘像素”。
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。
