
1、引言
现实生活中对于声源方向性的应用,主要有:吃鸡游戏、公路骑行、找手机,确定谁在讲话等。声源方向性研究是确定一个声音在空间来源位置的技术。
为什么人耳会在现实中听出声音的方向性?这取决于双耳音量差、时间差、音色差。人们可以依靠双耳间的音量差、时间差和音色差判别声音的方位。然而,人耳的原始声音定位功能毕竟只是为了解决生活和生存的问题,定位精度非常有限。现代工业化社会的生产生活中,很多场景的声源方位确定问题,人耳已经无法满足要求。
2、基于HRTF的声源方向性研究
HRTF(Head-Related Transfer Functions),一种音效定位算法。声源发出的声波经头部、耳廓、躯干等散射后到达双耳,其中的物理过程可视为一个线性时不变(LTI)的声滤波系统,其特性可由系统的频域传输函数完全描述。HRTF正是这个声滤波系统的频域传输函数。在自由场的情况下,HRTF定义为:
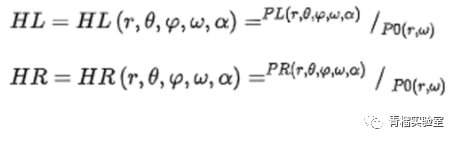
其中,PL、PR分别是简谐点声源在倾听者左、右耳产生的复数声压。Po是人头不存在时,头中心位置处的复数声压。一般情况下HL,HR是声源的水平方位角θ,仰角Φ,声源到头中心的距离r以及声波的角频率Ω的函数。
HRTF的主要原理,以下述为例:
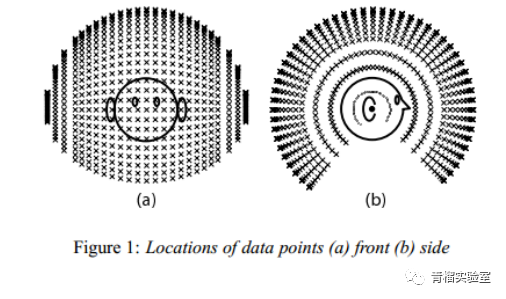
使用1米的半径球体,监视实验人员头部的脉冲信号(44.1kHz,16bit),HRIR为200个采样点,约4.5ms。
水平位置选取25个点,其中-45与45之间,每5度选取一个值:
【-80,-65,-55,-45:5:45,55,65,80】
垂直位置选取50个点,其中-45与230.625之间每5.625度选取一个值,为64份,由于HRTF是一个具有个性化特点的数据集,测量的空间点不够精细,无法完全模拟真实空间的声音方位。因此,监视人员脚底无点位,最终选取50个点:
【-45:5.625:230.625】
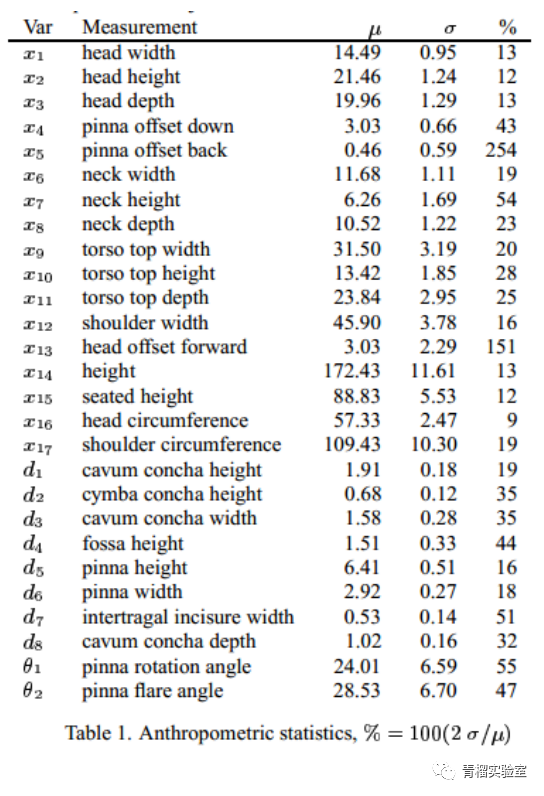
HRTF的个性化体现包括:人体测量,实验人员的体重、年龄、性别等。经实验得出,耳廓、头部、躯干会对声音方向性的确定产生影响,影响系数依次递减。
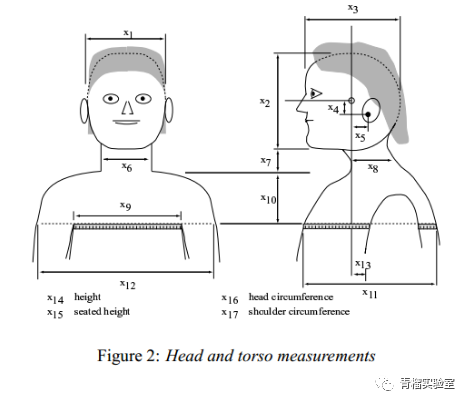
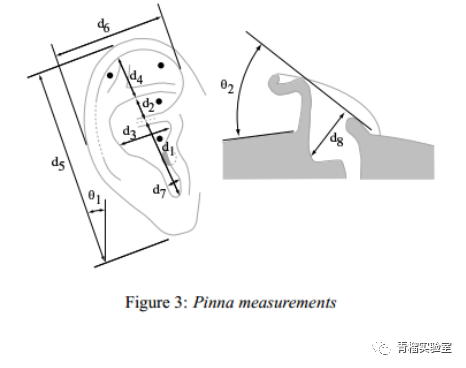
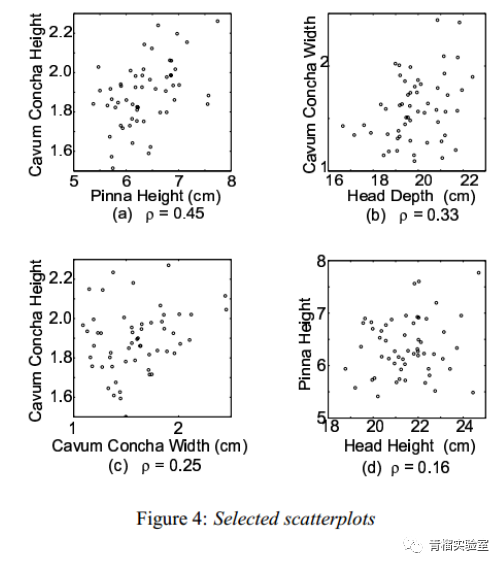
以上测量数据与声源方向性定位的相关性,如下图(其中x1:头宽为14.49cm的均值,95%的数据位于均值左右各13%的区间内的正态分布):
强相关性:耳廓高度[d5]和腔外耳高度[d1];
一定相关性:头深度[x3]和腔外耳宽度[d3];
弱相关性或无相关性:腔外耳的宽与高、头的高度与耳廓的高度。
基于以上原理,通过陀螺仪传感器获取旋转角度数据,并对陀螺仪的数据进行处理:
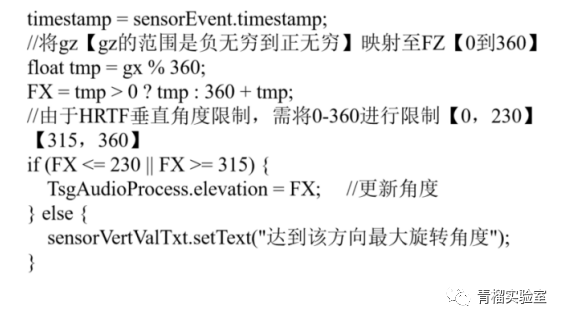
卷积模式选择:支持三种模式,其中full和same两种需要补充数据;且full处理后,数据量增加;而valid处理后数据量减少,因此先采用same模式一次,然后选择valid模式。最后,根据卷积模式计算输出长度分配空间,然后调用卷积计算,完成声源方向性确定。
结语
声源方向性研究除了可以用于日常生活声源方向的确定,还可用于噪声声源定位,通过噪声方位的确定,有效应对各类噪声问题。此外,HRTF在声源方向性确定方面仍存在不足:同角度的远近效果无法很好的表现,后续需继续研究与扩展。
作者:相迎迎 | 来源:青榴实验室
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。
