
| Zhang T K, Chen C B, Xu Y, Loo J & Xu W J. Joint Task scheduling and multi-UAV deployment for aerial computing in emergency communication networks. Sci China Inf Sci, 2023, doi: 10.1007/s11432-022-3667-3 |
研究意义
在无人机野外火灾搜救或者震后救灾等应急场景中,可以通过基于无人机的空地协同边缘计算架构协助地面终端进行任务计算。而现有的应急通信网络中对于无人机的应用研究主要着重于灾后通信的恢复,缺乏考虑应急场景下地面终端的任务计算需求,并没有进一步考虑空地协同架构中的计算任务卸载问题。
另一方面,现有的边缘计算策略研究主要解决云边协同架构下的无人机边缘计算任务调度与卸载问题,需要依赖于部署于地面的云服务器的计算能力,因此无人机需要与地面云服务器具有通信链路。然而,在野外军事、震后救灾等应急场景下,无人机节点与云服务器之间的通信条件可能遭到损坏,无法进行任务信息的传输。同时,现有的轨迹优化算法一般由任务信息提前确定,不会随着用户机动性的变化而调整,无人机的轨迹不会随着地面人员的移动性变化而调整。并且,其任务调度策略中的优化问题较少对无人机节点的当前能量状态与地面终端的能耗进行考虑,导致部分无人机或者地面终端提前退出边缘架构,使得原先的任务调度方案失效。
基于上述现状,本文针对时延敏感和能耗敏感的任务需求建立了以时延与能耗加权和最小为目标的优化问题,而后通过研究无人机节点位置部署与任务调度的联合优化算法,最小化系统成本。
本文工作
论文针对不同的任务应用需求,建立了以时延与能耗加权和最小为目标的优化问题,而后通过研究无人机节点位置部署与任务调度的联合优化算法,使系统成本达到了最小。
具体内容如下:
(1) 提出了基于ad-hoc网络的空地协同架构,建立了任务执行模型,无人机节点的悬停与飞行损耗模型,并且依据不同的任务需求,以时延与能耗加权和的形式在系统模型中确定了任务调度成本、悬停与飞行消耗优化成本。在此基础上,将各个成本和作为系统总成本提出了优化问题。
(2) 由于所述问题的复杂度较高,本文将优化问题转化为两个子问题:任务调度策略子问题和多无人机部署子问题。由于这两个子问题的本质是多对多匹配问题和连续非凸问题,本文使用交换匹配算法和逐次凸逼近算法来求解。据此,本文通过迭代这两个子算法,提出了一种联合优化策略。
(3) 通过数值仿真验证了该策略的收敛性和有效性。仿真结果表明,在基于ad-hoc的空地协同架构下,所提策略与基准算法相比,可大大降低任务延迟和能耗。在不同的任务场景下,延长了网络的生存时间,实现了任务时延和能耗之间的良好平衡。
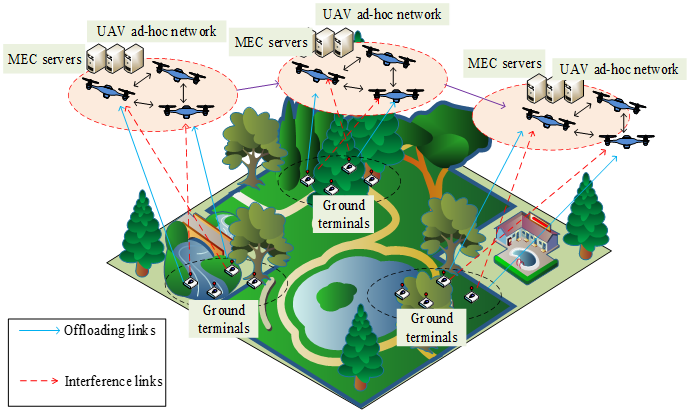
基于ad-hoc的空地协同架构图
实验结果
在数值仿真平台上进行了算法的收敛性和有效性的验证,并且相对于启发式算法、随机接入固定位置算法以及基于交换匹配的任务调度和无人机部署算法做了比较。仿真结果表明所提算法的收敛速度较快,有利于分布式架构下无人机位置部署与任务调度策略实现。而后,在地面终端数量与无人机节点计算资源变化情况下,对于时延敏感和能耗敏感情况下分别进行了系统仿真。仿真结果表明,相较于基准算法,所提算法的任务平均消耗时延与能耗均大大下降。同时,在系统模型中考虑了无人机节点当前能量后,有效地优化了无人机节点网络的生存时间。最后验证了权重对于系统性能的影响,充分说明了任务时延与能耗之间的矛盾关系。
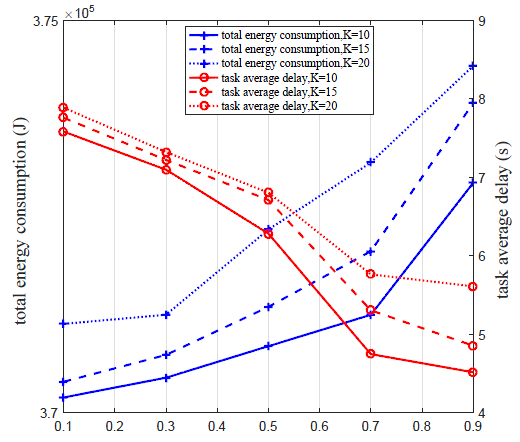
权重对于系统性能的影响
全文下载:
http://engine.scichina.com/doi/10.1007/s11432-022-3667-3
作者:张天魁,陈潮彬,徐瑜,Jonathan Loo,许文俊
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。
