
机器视觉在不同的复杂技术领域有着广泛应用。在简单的应用中(例如,利用背光检测不透明物体的轮廓),成像系统可在宽松的系统参数条件下可靠地运行。但在要求较高的应用中(比如检测镜面的表面缺陷),必须将主要参数设置在较小的公差范围内,或使用成本更高的高精度硬件,成像系统才能稳定运行。
成像系统中涉及的主要参数的数量,随着成像应用复杂度的提高而增加。Edmund Optics东京成像实验室对此进行了研究,对于要求较高的成像应用,需要精确调整的参数大约多达20个。
图像采集优化
本文主要讨论图像采集优化(以下称为OIA),即:将成像系统中的所有主要参数调整到能够获得最佳图像的过程。完成OIA后,获得的图像具有以下共同特点:
1)在成像系统物理条件限制下,所拍摄的图像获得尽可能多的有用信息;
2)尽可能多地利用相机传感器的有效像素,让待测工件在视野范围内(FOV)最大呈现,仅受工件几何形状和位置变化的限制;
3)在不使用降噪算法的情况下,图像具有最高的信噪比,仅受传感器的参数限制;
4)图像的动态范围接近最大值,没有达到饱和;
5)图像中没有来自其他外部环境产生的不必要影像(例如未使用扩散片的环形光产生的亮斑)。
为达成OIA,需要对所有主要参数进行精确调整。经过OIA调整后的成像系统,为机器视觉系统集成商提供了以下优势:
1)高性价比
成像系统中的关键组件(成像镜头、相机、照明光源和光机结构)充分发挥作用,实现了具有成本效益的解决方案。
2)最少的图像运算处理和分析,最低的软件复杂度
由于OIA可以获得高还原度、高对比度和低噪声的图像,因此对图像处理算法(例如降噪、直方图均衡、膨胀/腐蚀)的需要降至最低,从而显著减少了开发周期、测试时间和硬件成本。
3)显著降低误判率,高质量的图像减少了测试错误
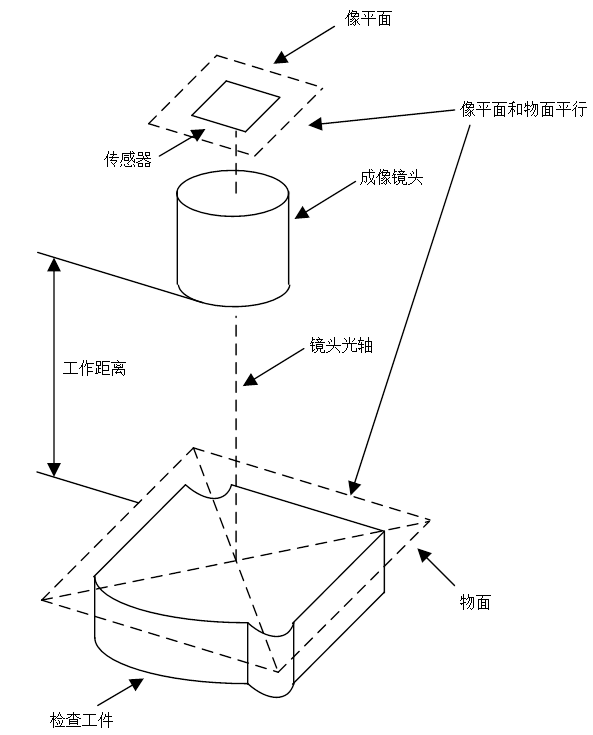
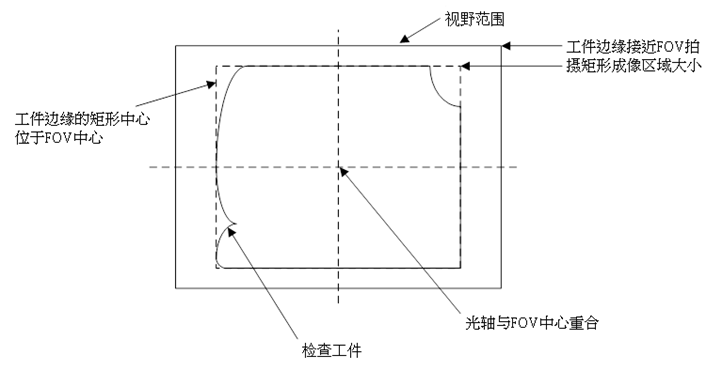
已经调整好的成像系统可以满足以下条件,如图1和图2所示:
1)像平面(传感器面)和物面(检查工件表面)平行;
2)被检查的工件表面位于工作距离(WD)最佳聚焦位置;
3)被检查的工件,接近FOV拍摄矩形成像区域大小,但不超过FOV;
4)工件中心位于镜头的光轴上;
5)被检查工件的浅色(白色、浅灰色等)区域特征,其成像亮度接近像素灰度饱和值(例如8位格式为255,灰度值可以达到220),但未达到饱和。
调整方法
通常的调整方法是:操作人员通过相机观察图像,以主观判断完成。由Edmund Optics 日本分公司开发的调整应用程序,可对成像系统中的11-17个参数(取决于硬件条件)进行即时测量,从而为操作人员提供实时量化的参数以进行判断。
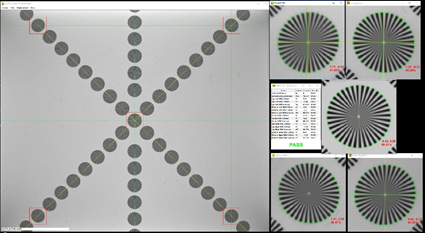
以下案例中,使用的是西门子星标测试板(产品编号58835)。将星标测试板的标刻面朝向成像系统,并使其与待测物平面重合。
使用EO开发的EORTM(Edmund Optics Real-Time Metrology)软件,实时运算和分析拍摄到的测试板图像。EORTM可以在精确调整至少8组硬件参数(光学机械平台的六个自由度、光源亮度和相机曝光时间)的过程中,给操作人员提供实时闭环反馈。
借助EORTM,在高精度机器视觉应用中调整参数的时间,从大约数小时减少到20分钟甚至更短,但是精度却提高了至少2倍,因为它提供精确可量化指标,而不是依靠主观判断。
一旦所有硬件调整都在软件设定的允许范围内,EORTM将显示如图3所示的全部通过状态,并且判定图像系统已调整完成。
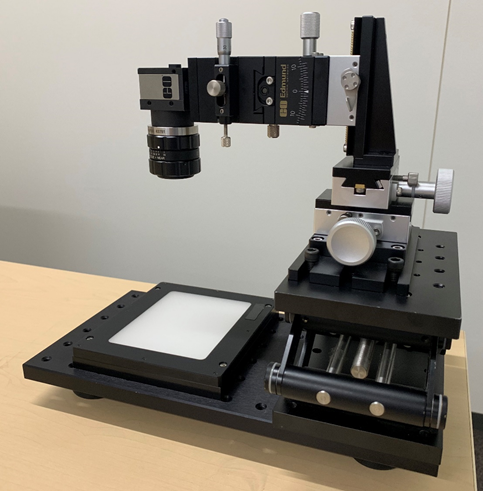
硬件配置包含一个6维自由度调整平台和相关的光机结构件,以及照明光源和测试板,完全由EO产品目录中的标准产品组成,如图4所示。
结论
为了达到OIA,需要精确调整近20种光学、机械、电子和软件参数。表1中列出了这些参数,根据其需要调整的频率归类为:
1)设计阶段(DT):一次,系统规划选型时;
2)设置阶段(ST):一次,相机初始化安装时;
3)实时调整(RT):多次,在OIA调整过程中视需要,可通过可视化或使用软件实时测量获得反馈。
表1:OIA调整过程的主要参数
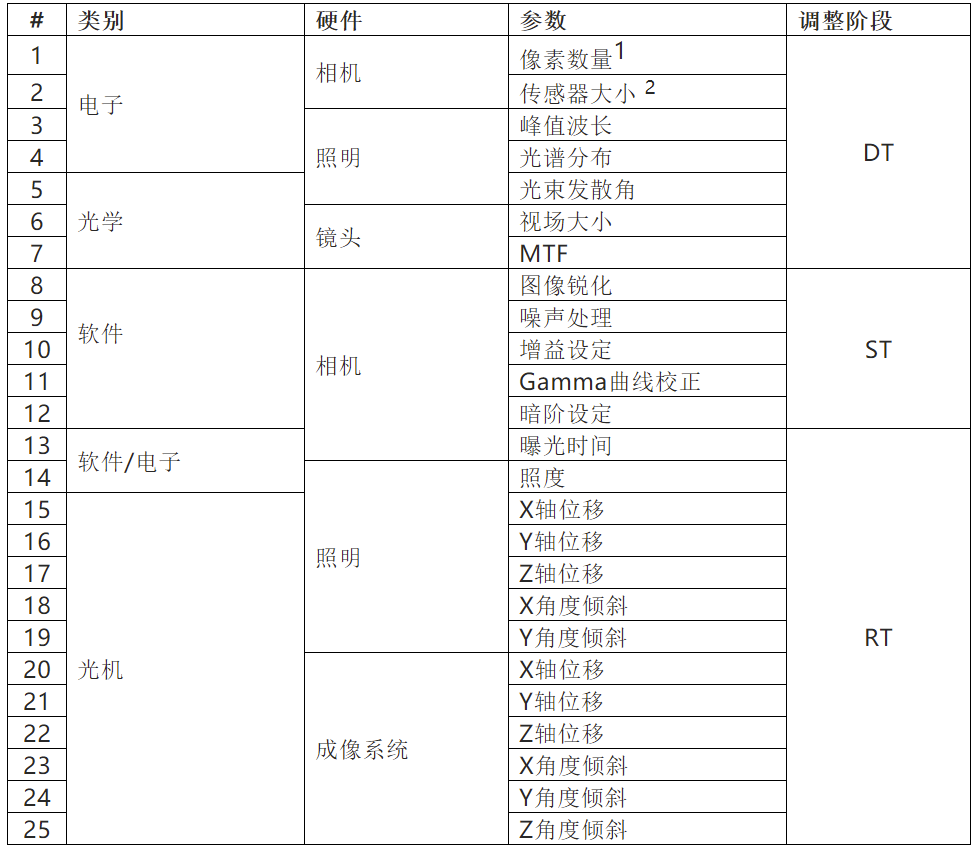
注:1:通常也称为分辨率;2:像素大小代表图像分辨率,这里没有列出,因为它可以根据像素数量和传感器尺寸计算得出。
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。
